Arrival Procedures • 35
If the rejected landing is due to conicting trac, maneuver as necessary during
the climb to clear and avoid conicting trac.
Precision Approach & Landing
ATP recommends setting aps 10° at glideslope intercept for ILS precision
approaches. Flaps 10° allows for a stabilized approach to touchdown.
1. Complete the “Approach Checklist” and identify the localizer as early as
possible.
2. Slow to 90 KIAS on vectors or when on nal approach course inbound.
3. Announce “Localizer Alive” when localizer begins moving towards the
center.
4. Announce “Glideslope Alive” when glideslope begins moving towards
the center.
5. Verify no ags at glideslope intercept altitude and marker.
6. ½ dot below glideslope intercept: “Before Landing Checklist.”
7. Reduce power, select aps 10°.
8. Descend on glideslope at 80 KIAS.
9. Announce at 1,000’ above DA: “1,000 to go.”
10. Announce at 100’ above DA: “100 to go.”
11. “Minimums.”
12. Runway in sight: descend and slow to 70 KIAS.
13. When landing is assured, slow to 66 KIAS until the roundout.
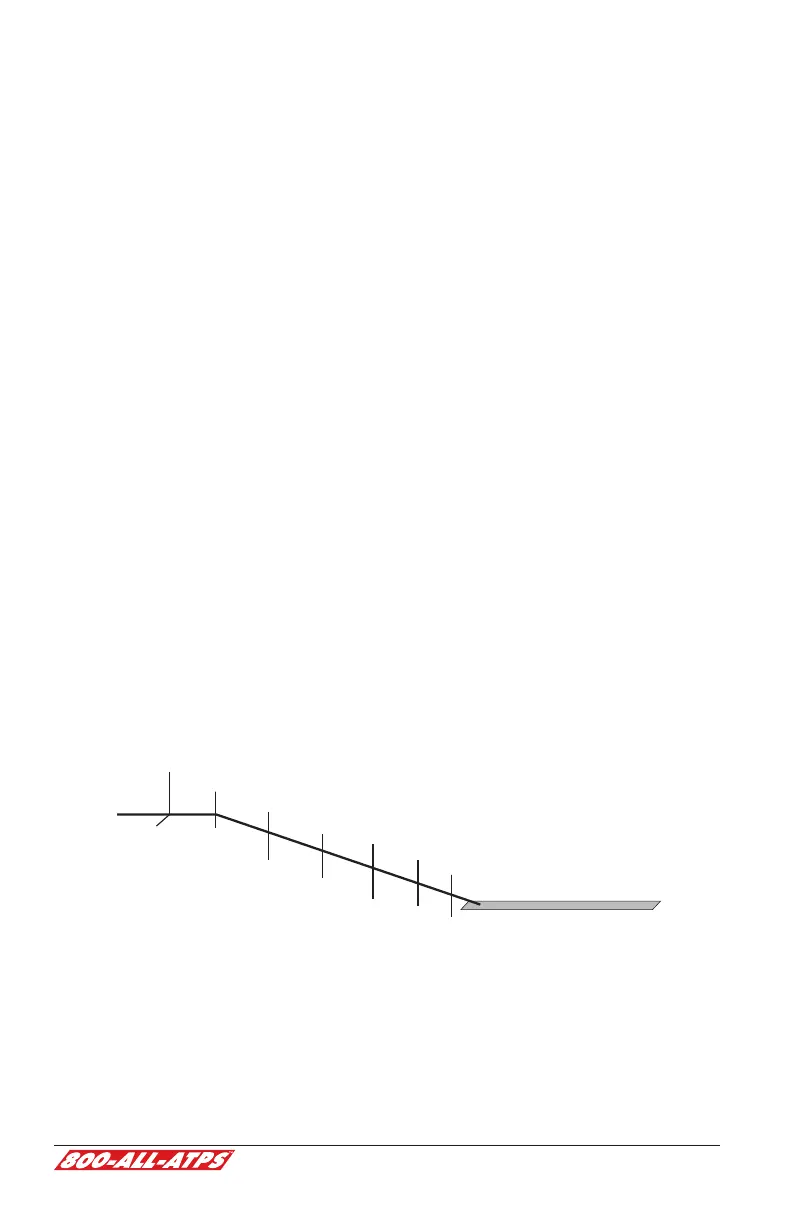
ILS Approach & Landing Prole
“Before Landing Checklist”
Reduce Power
Select Flaps 10˚
Descend at 80 KIAS
90 KIAS
1,000’ Above DA
100’ Above DA
DA
Landing Assured
½ Dot
Below
Glideslope
Intercept
“1,000 to go”
“100 to go”
“Minimums”
Slow to 66 KIAS
Runway
in Sight
Slow to 70 KIAS
Non-Precision Approach & Landing
1. Load approach into the GPS, and select appropriate nav source and
frequency.