22
NeoSlider
TM
- Sliding Gate Opener NES-24V3 Owner Installation Instructions
NOTE: The System will automatically return to
the main screen after 30 secs if a menu screen is
displayed and no buttons are pressed.
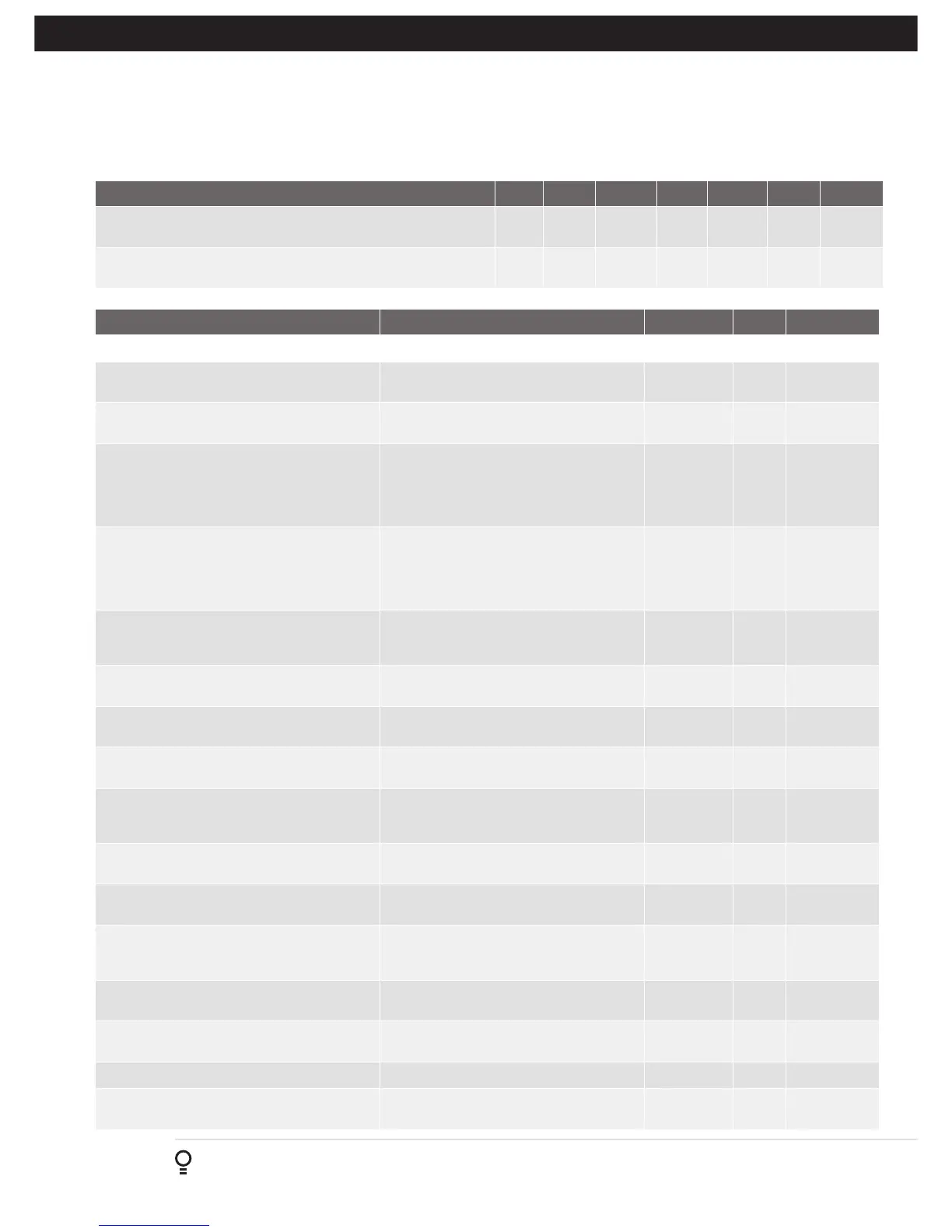
Appendix
A - Console Menu Structure
Parameter Option Default Menu Section
Menu 7 - Operating Modes
SB1 TYPE 2 WIRE
3 WIRE
2 WIRE 7.1 Appendix D
SB2 TYPE 2 WIRE
3 WIRE
2 WIRE 7.2 Appendix D
SB1 INPUT MODE
Sets the Input mode for Safety Beam 1.
Only one option can be selected.
NOT USED, CLS TO REV
CLS TO STOP OPN/CLS TO STOP
OPEN INPUT SWIPE INPUT
CLOSE INPUT PED INPUT
DISABLED
NOT USED 7.3 Appendix D
SB2 INPUT MODE
Sets the Input mode for Safety Beam 2.
Only one option can be selected.
NOT USED, CLS TO REV
CLS TO STOP OPN/CLS TO STOP
OPEN INPUT SWIPE INPUT
CLOSE INPUT PED INPUT
DISABLED
NOT USED 7.4 Appendix D
PED INPUT = SWIPE MODE Selects PED
input functions as pedestrian access swipe
input
Off Off 7.5 Appendix D
OPN INPUT N/C OPERATION
Selects operating polarity of OPN input
Off Off 7.6 Appendix D
STP INPUT N/C OPERATION
Selects operating polarity of STP input
Off Off 7.7 Appendix D
REMOTE CODE ENABLED
Selects remote transmitter coding function
On On 7.8 Appendix D
VACATION MODE
Selects vacation mode - disables remote
control
Off Off 7.9 Appendix D
BATTERY/SOLAR MODE
Selects Battery Backup/Solar operation
BATTERY ENABLED
SOLAR ENABLED
BATTERY
ENABLED
7.10 Appendix D
PASSWORD
Selects password protection for all changes
Off Off 7.11 Appendix D
TX # GROUPING
Selects transmitter number group display
format.
Off Off 7.12 Appendix D
OUTPUTS 1 MODE
Selects function of OUTPUT1
LOCK DRIVE LIGHT DRIVE
3 WIRE SB 0V NOT USED
7.13 Appendix D
OUTPUTS 2 MODE
Selects function of OUTPUT2
LOCK DRIVE LIGHT DRIVE
3 WIRE SB 0V NOT USED
7.14 Appendix D
FAULT AUTO RESET Off Off 7.15 Appendix D
SBFEC MODE AVAILABLE
DISABLED
AVAILABLE 7.16 Appendix D
Parameter Min Max Default Step Unit Menu Section
HOMING / SETUP SPEED VOLTS
Voltage applied to motors when setting up the travel limits
12 24 12 1 Volts 6.5
STOP PAUSE TIME
Pause time used between motor direction changes
0.0 2.0 0.3 0.1 SEC 6.6