16-4 9440300990
Stability Tuning DECS-250
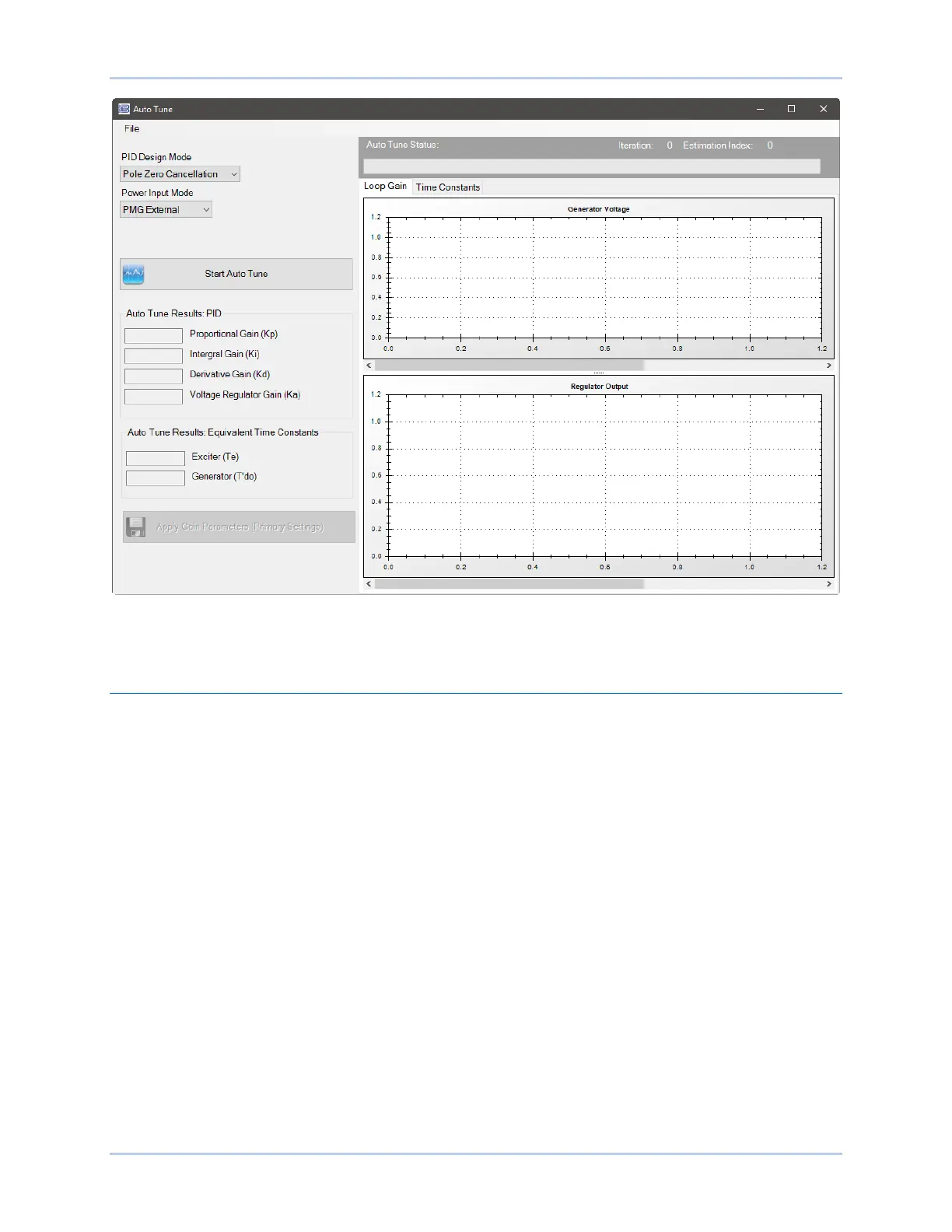
Figure 16-3. Auto Tuning Window
The File menu contains options for importing, exporting, and printing a graph (.gph) file.
FCR and FVR Modes
BESTCOMSPlus Navigation Path: Settings Explorer, Operating Settings, Gain, FCR/FVR
HMI Navigation Path: Settings, Operating Settings, Gains, FCR Gains or FVR Gains
Stability tuning can be tailored for optimum performance when operating in field current regulation or field
voltage regulation mode. BESTCOMSPlus FCR stability settings and FVR stability settings are illustrated
in Figure 16-4.
FCR Mode Stability Settings
The DECS-250 bases its field current output upon the following settings.
The proportional gain (K
p
) is multiplied by the error between the field current setpoint and the actual field
current value. Decreasing K
p
reduces overshoot in the transient response. Increasing K
p
speeds the
transient response.
The integral gain (K
i
) is multiplied by the integral of the error between the current setpoint and the actual
field current value. Increasing Ki reduces the time to reach a steady state.
The derivative gain (K
d
) is multiplied by the derivative of the error between the current setpoint and the
actual field current value. Increasing K
d
reduces ringing in the transient response.
Additional FCR stability settings remove the noise effect on numerical differentiation (derivative time
constant T
d
) and set the voltage regulator gain level of the PID algorithm (K
a
) with recommended gain
calculation.