9440300990 16-5
DECS-250 Stability Tuning
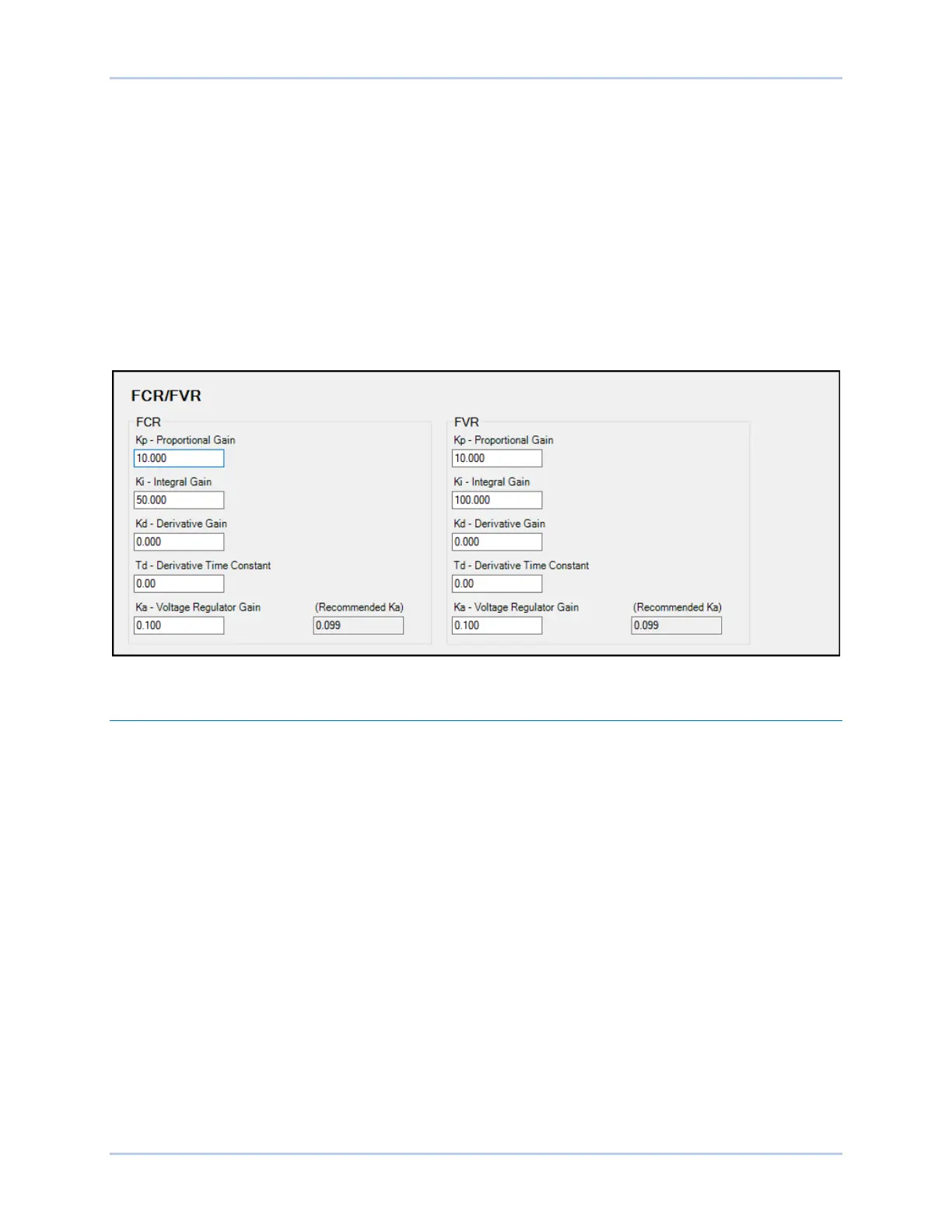
FVR Mode Stability Settings
The DECS-250 bases its field voltage output upon the following settings.
The proportional gain (K
p
) is multiplied by the error between the field voltage setpoint and the actual field
voltage value. Decreasing K
p
reduces overshoot in the transient response. Increasing K
p
speeds the
transient response.
The integral gain (K
i
) is multiplied by the integral of the error between the voltage setpoint and the actual
field voltage value. Increasing K
i
reduces the time to reach a steady state.
The derivative gain (K
d
) is multiplied by the derivative of the error between the voltage setpoint and the
actual field voltage value. Increasing K
d
reduces ringing in the transient response.
Additional FVR stability settings remove the noise effect on numerical differentiation (derivative time
constant T
d
) and set the voltage regulator gain level of the PID algorithm (K
a
) with recommended gain
calculation.
Figure 16-4. FCR and FVR Gain Settings
Other Modes and Functions
BESTCOMSPlus Navigation Path: Settings Explorer, Operating Settings, Gain, var, PF, OEL, UEL,
SCL, VAR Limiter
HMI Navigation Path: Settings, Operating Settings, Gains, Other Gains
Settings for stability tuning of the Var and Power Factor modes are provided in the DECS-250 along with
settings for stability tuning of limiters, the voltage matching function, and main field voltage response.
Figure 16-5 illustrates these settings as they appear in BESTCOMSPlus.
Var Mode
The integral gain (K
i
) adjusts the Var mode integral gain which determines the characteristic of the DECS-
250 dynamic response to a changed var setpoint.
The loop gain (K
g
) adjusts the coarse loop-gain level of the PI algorithm for var control.
Power Factor Mode
The integral gain (K
i
) adjusts the integral gain which determines the characteristic of the DECS-250
dynamic response to a changed power factor setpoint.
The loop gain (K
g
) adjusts the coarse loop-gain level of the PI algorithm for power factor control.