37
F_14 Stopping method = 0 : Controlled deceleration stop
= 1 : free run to stop
F_15 DC braking time = 0 ~ 25.5 sec
F_16 DC braking starting frequency = 1 ~ 10 Hz
F_17 DC braking level = 0 ~ 20 %
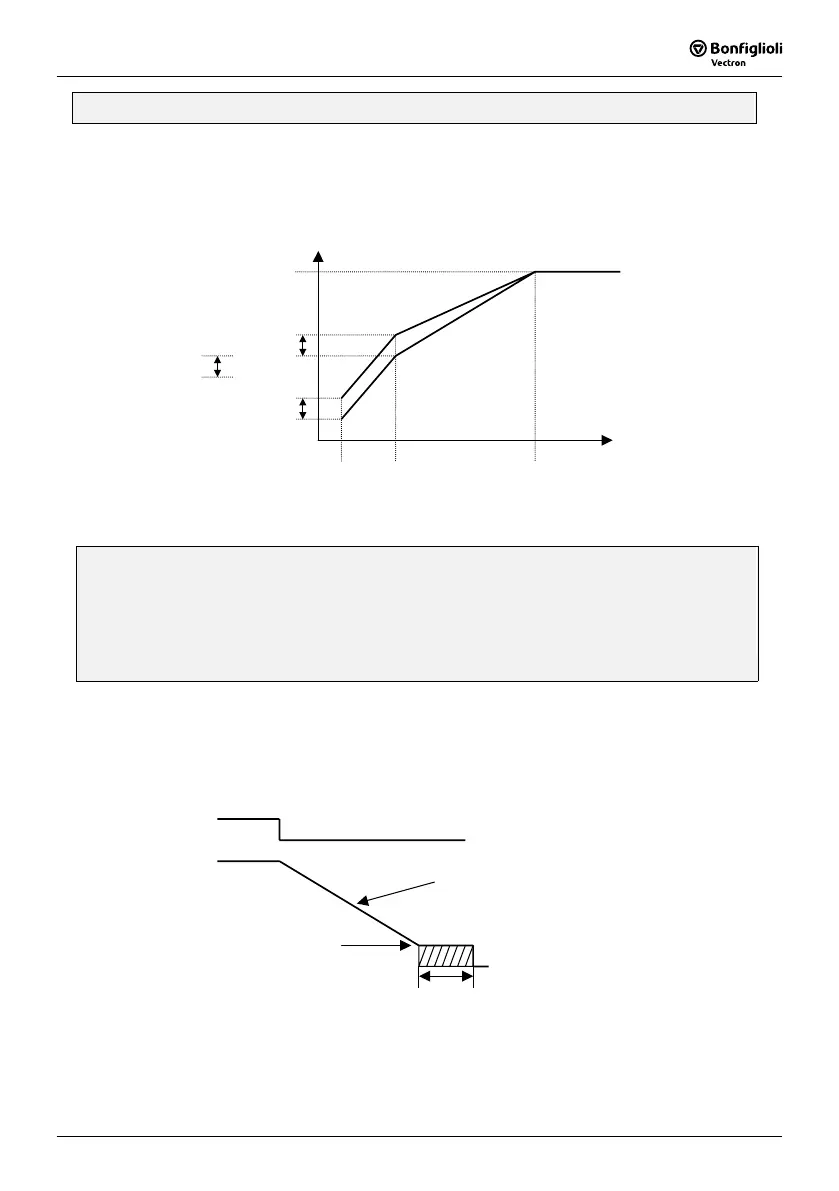
If F_14 = 0
When the inverter receives the stop command, it decelerate to the pre-set frequency setup by F_16
after this the output voltage level that is set in the F_17; will determine the amount of DC voltage
that’s injected into the motor. The time duration to perform this stopping function is setup in F_15.
If F_14 = 1
The inverter stops output immediately after receiving the stop command. The motor will enter into a
free running state until it comes to a complete stop.
1 2.5/3.0
50/60
Hz
F_13=
B
C
100%
Voltage
Run Command
Output Frequent Deceleration Time
DC Braking Frequency
DC Braking Time
F_13: Torque compensation gain = 0 ~ 10 %
To enhance Inverter output torque patterns according to the B, C voltage points on the V/F pattern
(refer to F_05 description) and the (F_13) for this feature.
NOTE: When F_13 = 0, the torque boost function is disabled.
 Loading...
Loading...