E-42-
1067
POSITIONER TYPE 1067
On the basis of Kcrit and Tcrit, the controller parameters can then be calculated in accordance with
the following table:
Parameter settings according to Ziegler und Nichols :
Controller type Parameter settings
P controller Kp = 0,5 Kcrit
P controller Kp = 0,45 Kcrit Tn = 0,85 Tcrit
P controller Kp = 0,6 Kcrit Tn = 0,5 Tcrit Tv = 0,12 Tcrit
The Ziegler and Nichols adjustment rules were determined for P systems with a time delay of the first
order and a dead time. However, they apply only to controllers with a disturbance response, but not
to controllers with a command response.
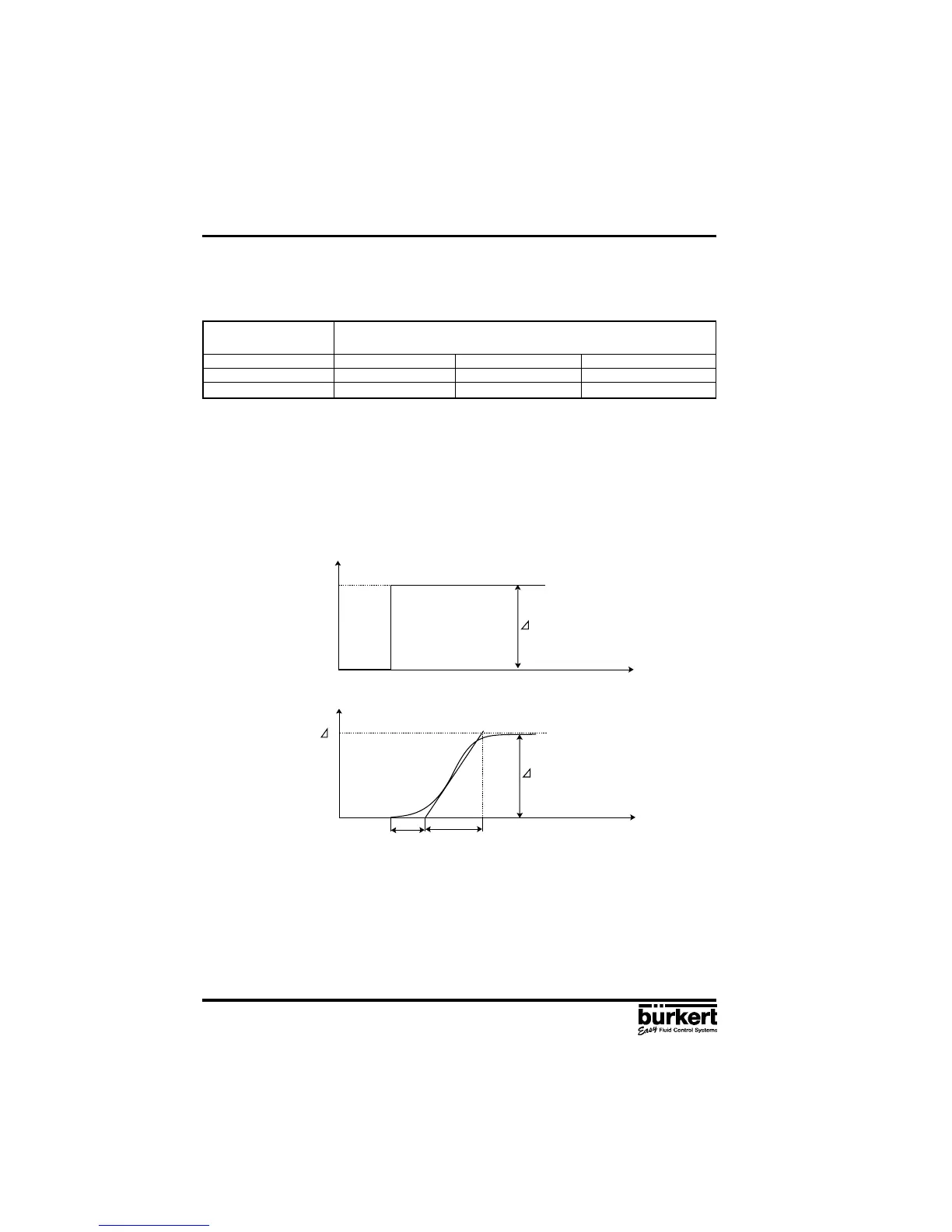
Adjustment rules according to Chien, Hrones and Reswick (manipulated variable methode):
When using this method, the controller parameters are adjusted on the basis of the controlled system
transition response. Be a 100% change in the manipulated variable; The times Tu and Tg are derived
from the progression of the variable (following figure). Ks is the proportional action coefficient of the
system.
APPENDIX
Figure : Progression of the controlled variable after a manipulated variable change ∆Y
Method :
- Set the controller to MANUAL mode.
- Output a manipulated variable change and record the controlled variable with a recorder.
- Switch off in good time if you encounter critical progressions (e. g. a risk of overheating) (Pay
attention to the fact that, in thermally inert systems, the actual value of the controlled variable may
increase further switching off).
Actual value
t
X
X
Tu
Tg
KS.
X
t
Y
Y
100%