1067
POSITIONER TYPE 1067
E-41-
t
X
APPENDIX
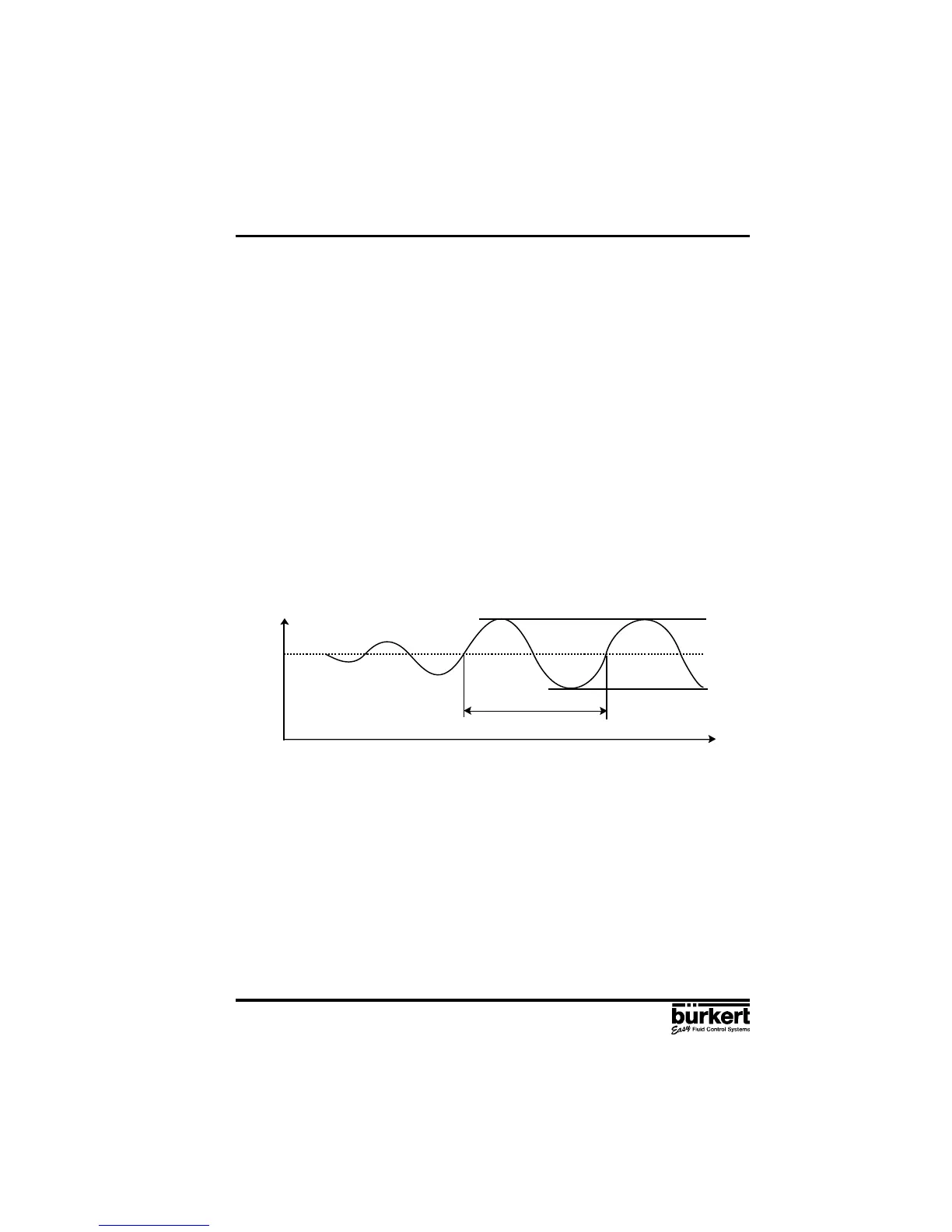
Figure : Progression of the control variable at the stability limit
The proportional action coefficient set at the stability limit is referred as Kcrit. The resulting oscillation
period is referred to as Tcrit.
A2: Rules for adjusting PID controllers
The litterature on control systems specifies a series of adjustment rules with which a favorable
adjustment of controller parameters can be achieved experimentally. To avoid bad adjustments, the
conditions under which the respective adjustment rules have been elaborated must always be
observed. In addition to the characteristics of the controlled system and of the controller itself, it is
important to know whether it is intented to balance out a disturbance change or a command variable
change.
Adjustment rules according to Ziegler and Nichols (oscillation method)
When using this method, controller parameters are adjusted on the basis of the control loop's
response at the stability limit. In doing so, the controller parameters are adjusted so as to ensure that
the control loop begins to oscillate. A conclusion as to a favorable adjustment of the controller
parameters is reached from critical characteristic values occurring in this case. It goes without saying
that, when using this method, it must be possible to bring the control loop to oscillation.
Method:
- Set the controller as a P controller (i.e. Tn = 999, Tv = 0), initially selecting a low Kp value.
- Set the required setpoint.
- Increase Kp until the controlled variable oscillates continuously without attenuation (see following
figure).
Tcrit
Actual value