15
4.2 Digital Inputs and Outputs
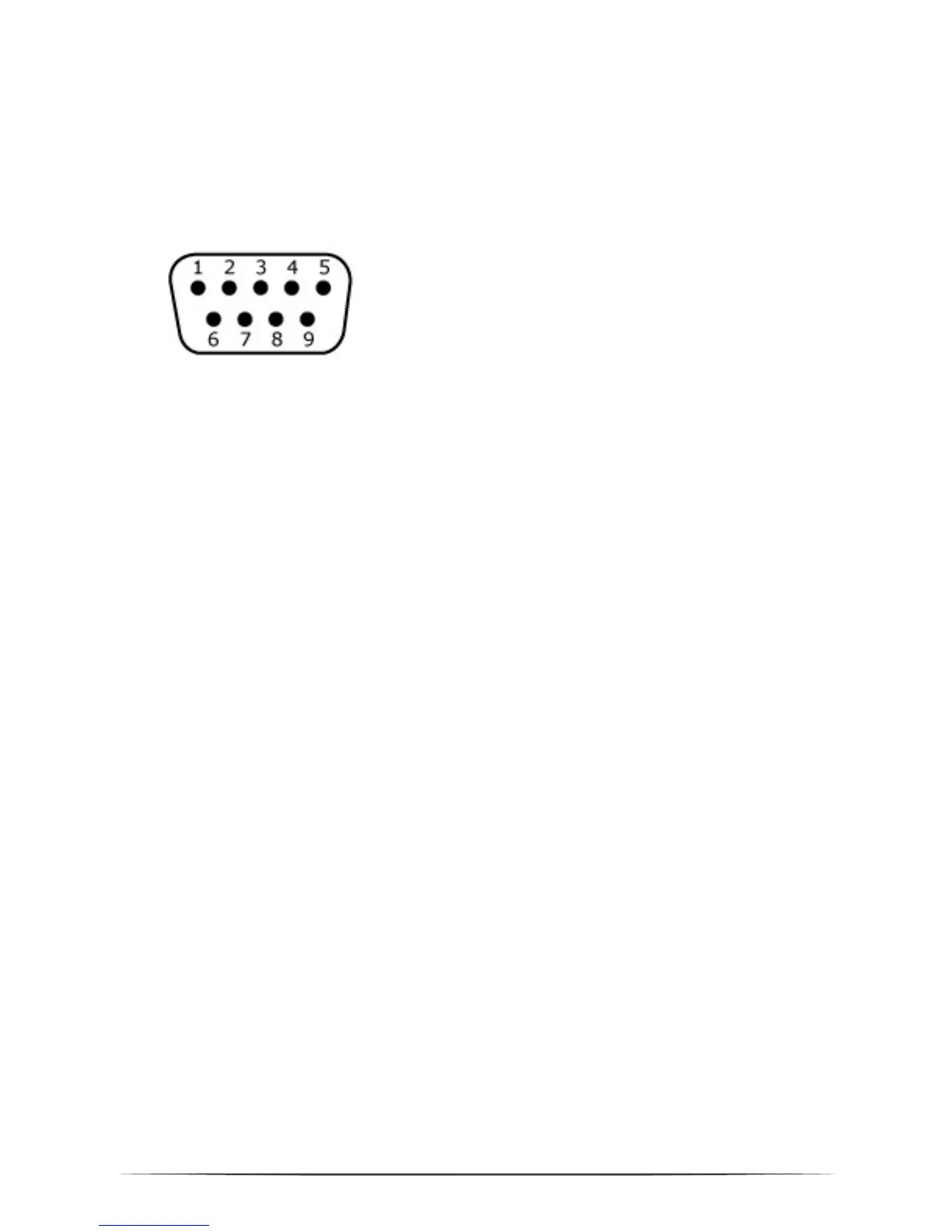
The robot base shows a D-Sub plug with several digital inputs and outputs. The pin
assignment is shown below.
D-Sub Male: View from the
front on the pins.
24V DIO, D-Sub Male
Pin 1: Out1 24V
Pin 2: Out2 24V
Pin 3: Out3 24V
Pin 4: In1
Pin 5: In2
Pin 6: In3
Pin 7: In4
Pin 8: GND
Pin 9: 24V Supply
The 24V-DIO-Board provides relays and 12 to 24V digital inputs, allowing to
communicate with a PLC on 24V level. The outputs are able to provide 1A each,
forwarding the external supply voltage from pin 9. The inputs are 12 to 24V.
Two further digital outputs with TTL-Level can be found on the flange of the robot,
see the next section.
4.3 Mounting Flange for the Gripper
The robot flange offers 10 M3 threads to connect gripper or other devices. A plug
allows electrical connectivity.
Six of the threads are placed on a 15 mm reference circle; the remaining 4 M3
threads are located as shown in the drawing. The plug is a Harting product SEK male
6 poles: