Safety
Information
Product
Information
Mechanical
Installation
Electrical
Installation
Keypad and
Display
Parameters
Quick Start
Commissioning
Diagnostics Options Parameter List
UL Listing
Information
52 Commander SK Size 2 to 6 Getting Started Guide
www.controltechniques.com Issue Number: 2
7 Quick Start Commissioning
This procedure is written from default parameter settings as the drive would be delivered from the factory.
7.1 Terminal control
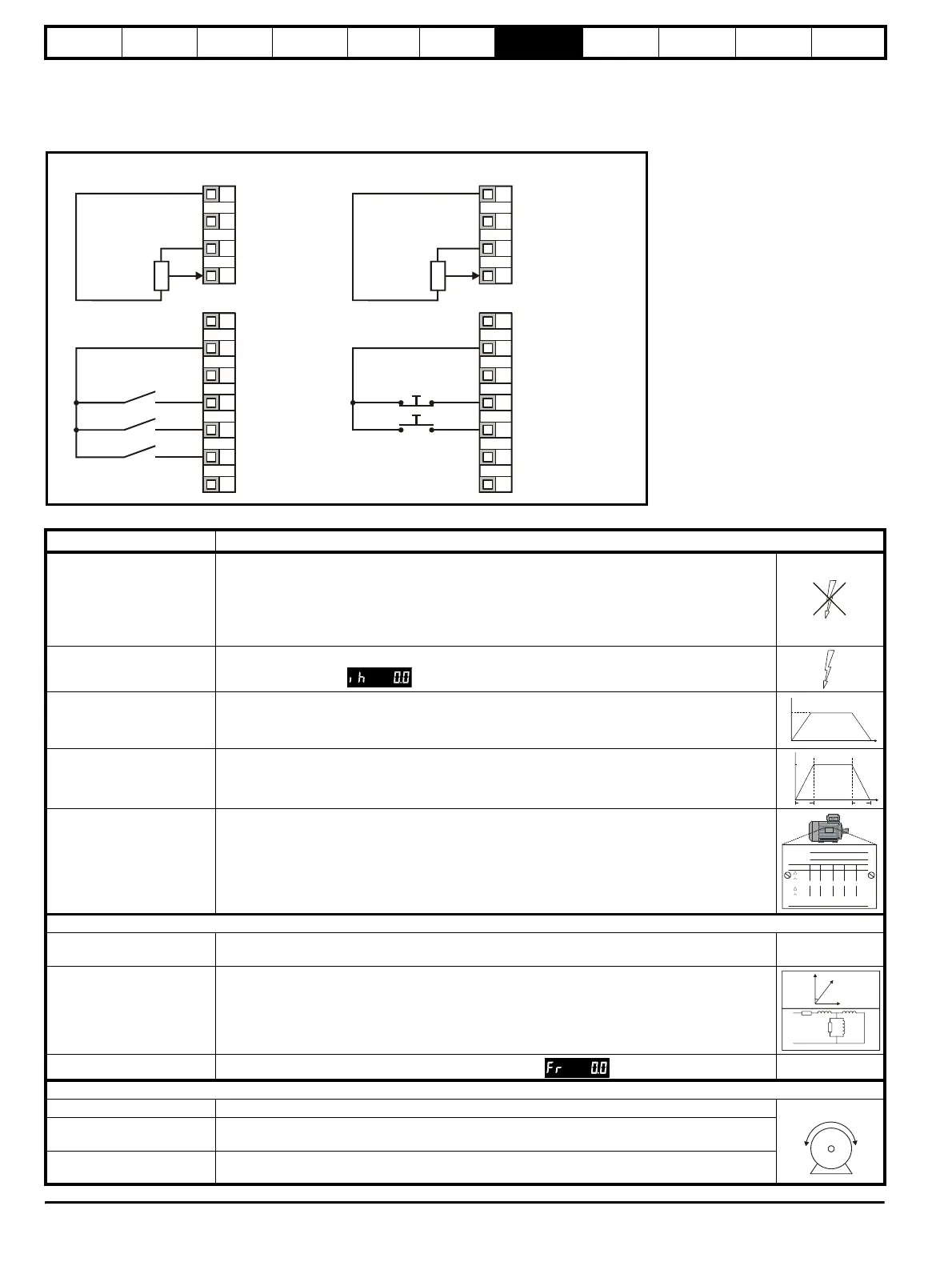
Figure 7-1 Minimum required control terminal connections
Terminal B7 open: Local voltage speed reference (A2) selected
0V
Remote current speed
reference input (A1)
+10V reference output
Local voltage speed
reference input (A2)
+24V output
Drive Enable/Reset
Run Forward
Run Reverse
Local (A2)/Remote (A1)
speed reference select
10k
(2kmin)
Eur USA
Analogue output
(motor speed)
Digital output
(zero speed)
Speed
potentiometer
0V
Remote current speed
reference input (A1)
+10V reference output
Local voltage speed
reference input (A2)
+24V output
/Stop
Run
Jog
Local (A2)/Remote (A1)
speed reference select
10k
(2kmin)
Analogue output
(motor speed)
Digital output
(zero speed)
Speed
potentiometer
T1
T2
T3
T4
B1
B2
B3
B4
B5
B6
B7
T1
T2
T3
T4
B1
B2
B3
B4
B5
B6
B7
Action Detail
Before power up
Ensure:
• The drive enable signal is not given, terminal B4 is open
• The run signal is not given, terminal B5/B6 is open
• The motor is connected to the drive
• The motor connection is correct for the drive ∆ or Y
• The correct supply voltage is connected to the drive
Power up the drive
Ensure:
• The drive displays:
Enter minimum and maximum
speeds
Enter:
• Minimum speed Pr 01 (Hz)
• Maximum speed Pr 02 (Hz)
Enter acceleration and
deceleration rates
Enter:
• Acceleration rate Pr 03 (s/100Hz)
• Deceleration rate Pr 04 (s/100Hz)
Enter motor nameplate details
Enter:
• Motor rated current in Pr 06 (A)
• Motor rated speed in Pr 07 (rpm)
• Motor rated voltage in Pr 08 (V)
• Motor rated power factor in Pr 09
• If the motor is not a standard 50/60Hz motor, set Pr 39 accordingly
Ready to autotune
Enable and run the drive
Close:
• The Enable and Run Forward or Run Reverse signals
Autotune
The Commander SK will carry out a non-rotating autotune on the motor.
The motor must be stationary to carry out an autotune correctly.
The drive will carry out a non-rotating autotune every time it is first started after each power-up. If this will
cause a problem for the application, set Pr 41 to the required value.
Autotune complete
When the autotune has been completed, the display will show:
Ready to run
Run The drive is now ready to run the motor.
Increasing and decreasing
speed
Turning the speed potentiometer will increase and decrease the speed of the motor.
Stopping
To stop the motor under ramp control, open either the run forward or run reverse terminal.
If the enable terminal is opened while the motor is running, the motor will coast to a stop.
Pr 02
t
Pr 01
100Hz
Pr 03
t
Pr 04
Mot X XXXXXXXXX
No XXXXXXXXXX kg
IP55 I.cl F C 40 s S1
°
VHzmin
-1
kW cos
φ
A
230
400
50 1445 2.20 0.80 8.50
4.90
CN = 14.5Nm
240
415
50 1445 2.20 0.76 8.50
4.90
CN = 14.4Nm
CTP- VEN 1PHASE 1=0,46A P=110W R.F 32MN
I.E.C 34 1(87)
cos
∅
σ
L
S
R
S