Curtis 1232E/34E/36E/38E & 1232SE/34SE/36SE Manual, os 30
35
24 NOVEMBER 2015
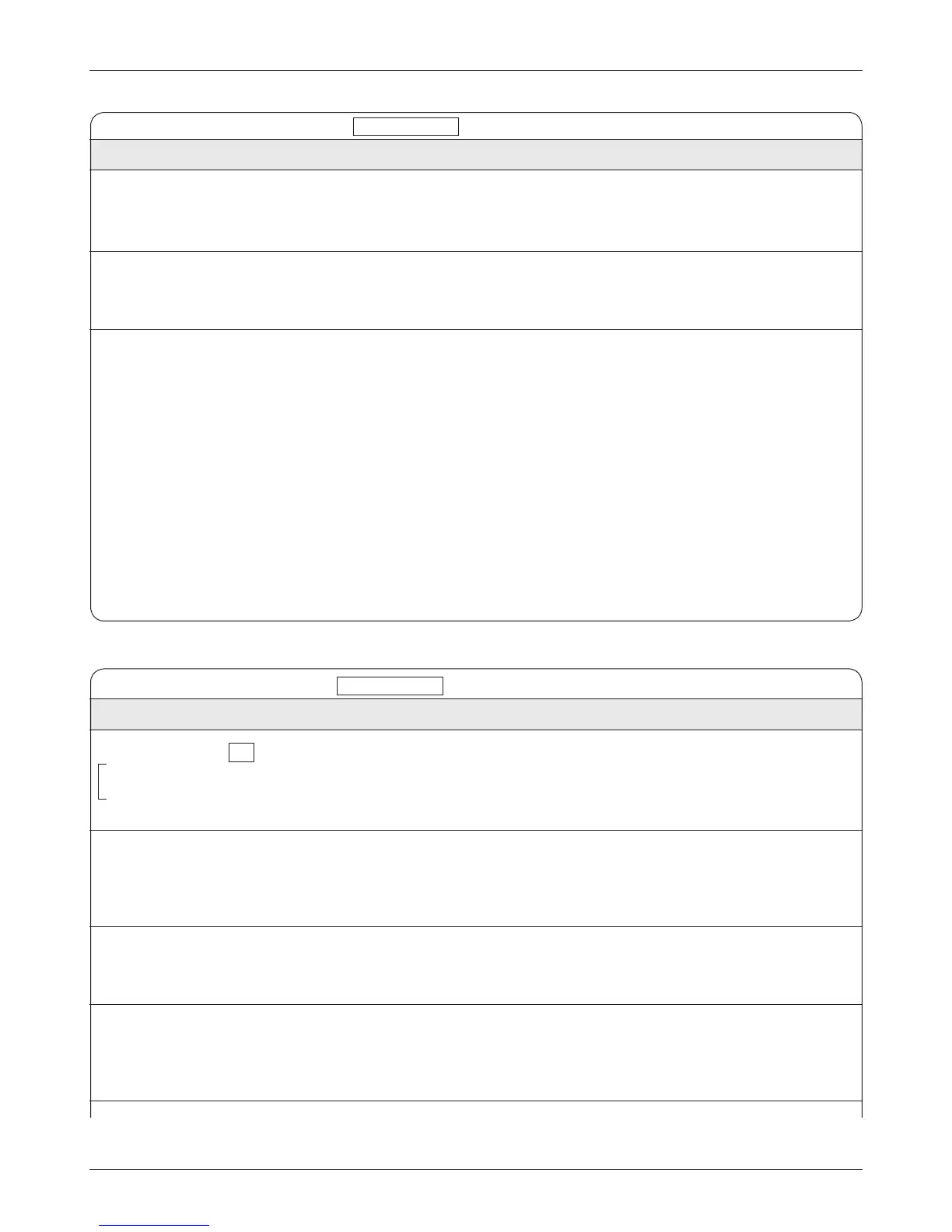
1 – SPEED MODE RESTRAINT MENU
ALLOWABLE
PARAMETER RANGE DESCRIPTION
Restraint Forward 0 – 100 % Increases torque when on a steep hill in order to limit roll-forward speed.
Restraint_Forward_SpdM 0 – 32767 Setting this parameter too high may cause oscillations in the motor as it
0x3020 0x00 attempts to limit the roll-forward speed.
Restraint Back 0 – 100 % Increases torque when on a steep hill in order to limit roll-back speed.
Restraint_Back_SpdM 0 – 32767 Setting this parameter too high may cause oscillations in the motor as it
0x301F 0x00 attempts to limit the roll-back speed.
Soft Stop Speed 0–500rpm Denesthespeedbelowwhichamuchslowerdecelrateisused.
Soft_Stop_Speed 0 – 500 Asettingofzerodisablesthefunction.Note:Thisparameterworksonly
0x3027 0x00 in Speed Mode and Speed Mode Express.
Soft Stop Speed is useful for vehicles that have fast deceleration
and vehicles operating on ramps using the Position Hold function.
Withvehiclesthathavefastdeceleration,thedrivermayndthe
nalspeedreductiontozerorpmuncomfortable;thevehiclemayeven
rock back as a result of tire wind-up. Soft Stop Speed allows the vehicle
to slow at the same fast rate until it reaches the set threshold, at which
point it changes to a slower (softer) deceleration rate. However, if the
threshold is set too high, the vehicle will feel like it is “running on.”
When throttle is released on a ramp, the vehicle may roll back
before Position Hold (see below) takes control. Soft Speed Stop can be
usedtoreducetheamountofrollback,butshouldn’tbesetsohighthe
vehicle drives up the ramp after the throttle is released.
1 – SPEED MODE POSITION HOLD MENU
ALLOWABLE
PARAMETER RANGE DESCRIPTION
Position Hold Enable On/Off AllowsthePositionHoldmodetobeenteredatzerothrottlewhen
Position_Hold_Enable On / Off the vehicle comes to a stop.
Position_Hold_Enable_Bit0 [Bit 0] Note: EM Brake Type = 2 also enables the Position Hold function.
0x3893 0x00
Position Hold Timeout 0.0 – 20.0 s Sets the maximum time the vehicle will stay in Position Hold before
Position_Hold_Timeout_Time 0 – 625 releasing the hold and going into Restraint mode. Setting the parameter
0x388C 0x00 tozerodisablesthistimeoutfunction,whichmeansthePositionHold
will be held. Activating the interlock resets the timer.
Kp
2 – 100 % Determines the stiffness with which position is regulated when in
Kp_Position_Hold 82 – 2048 Position Hold mode. High Kp will produce less rollback on a ramp, but
0x388A 0x00 more bouncing; see Kd below. Too much Kp will cause instability.
Kd 0 – 100 % Determines the damping in Position Hold mode. Some damping must
Kd_Position_Hold 0 – 8192 be present in the control system to keep the vehicle from oscillating
0x388D 0x00 slowly (“bouncing”). High Kd will improve the dynamic response of the
Position Hold controller, but too much Kd will cause fast instability.
3 — PROGRAMMABLE PARAMETERS: Restraint and Position Hold Parameters (SPEED MODE)
pcf