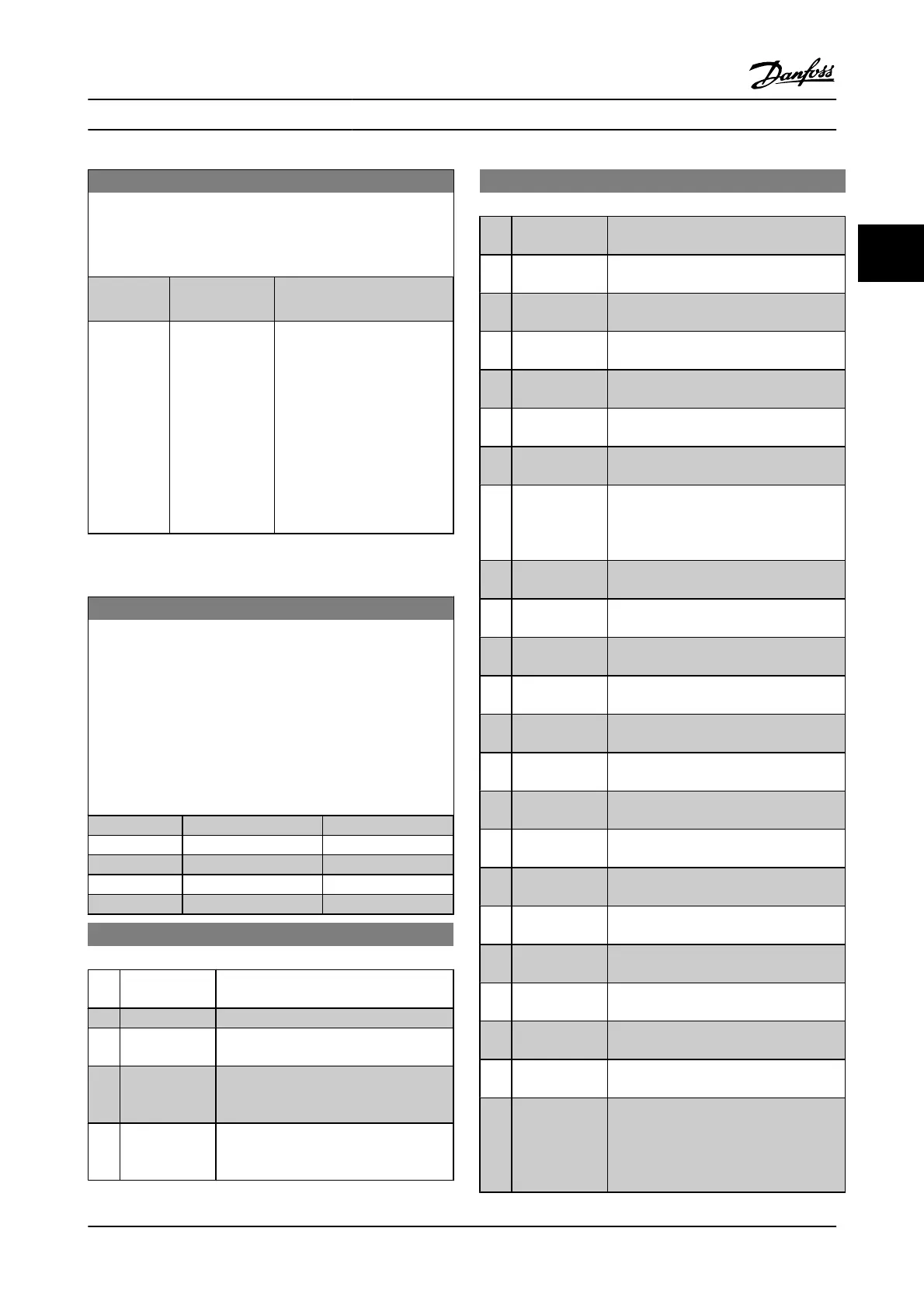
8-08 Readout Filtering
The function is used if the speed feedback value readouts on serial
communication bus are fluctuating. Select filtered if the function is
required. A power-cycle is required for changes to take effect.
Option: Function:
[0]
*
Motor Data Std-
Filt.
Select [0] for normal bus
readouts.
[1] Motor Data LP-
Filter
Select [1] for filtered bus
readouts of the following
parameters:
16-10 Power [kW]
16-11 Power [hp]
16-12 Motor voltage
16-14 Motor Current
16-16 Torque [Nm]
16-17 Speed [RPM]
16-22 Torque [%]
16-25 Torque [Nm] High
3.10.2 8-1* Ctrl. Word Settings
8-10 Control Word Profile
Select the interpretation of the control and status words
corresponding to the installed serial communication bus. Only the
selections valid for the serial communication bus installed in slot A
will be visible in the LCP display.
For guidelines in selection of FC profile [0] and PROFIdrive profile [1]
please refer to the Serial communication via RS 485 Interface section.
For additional guidelines in the selection of PROFIdrive profile [1],
ODVA [5] and CANopen DSP 402 [7], please refer to the Instruction
Manual for the installed serial communication bus.
Option: Function:
[0]
*
FC profile
[1] PROFIdrive profile
[5] ODVA
[7] CANopen DSP 402
[8] MCO
8-13 Configurable Status Word STW
Option: Function:
This parameter enables configuration of
bits 12 – 15 in the status word.
[0] No function The input is always low.
[1]
*
Profile Default Depended on the profile set in 8-10 Control
Profile.
[2] Alarm 68 Only The input will go high whenever Alarm 68
is active and will go low whenever no alarm
68 is active
[3] Trip excl Alarm
68
The input will go high whenever Trip on
other alarms is active, and then Alarm 68 is
active.
8-13 Configurable Status Word STW
Option: Function:
[10] T18 DI status. The input will go high whenever T18 has 24
V and will go low whenever T18 has 0 V.
[11] T19 DI status. The input will go high whenever T19 has 24
V and will go low whenever T19 has 0 V.
[12] T27 DI status. The input will go high whenever T27 has 24
V and will go low whenever T27 has 0 V.
[13] T29 DI status. The input will go high whenever T29 has 24
V and will go low whenever T29 has 0 V.
[14] T32 DI status. The input will go high whenever T32 has 24
V and will go low whenever T32 has 0 V.
[15] T33 DI status. The input will go high whenever T33 has 24
V and will go low whenever T33 has 0 V.
[16] T37 DI status The input will go high whenever T37 has 0
V and will go low whenever T37 has 24 V
[21] Thermal
warning
The thermal warning turns on when the
temperature exceeds the limit in the motor,
the adjustable frequency drive, the brake
resistor, or the thermistor.
[30] Brake fault
(IGBT)
Will go high when the brake IGBT is short-
circuited.
[40] Out of ref range If Comparator 0 is evaluated as TRUE, the
input will go high. Otherwise, it will be low.
[60] Comparator 0 If Comparator 0 is evaluated as TRUE, the
input will go high. Otherwise, it will be low.
[61] Comparator 1 If Comparator 1 is evaluated as TRUE, the
input will go high. Otherwise, it will be low.
[62] Comparator 2 If Comparator 2 is evaluated as TRUE, the
input will go high. Otherwise, it will be low.
[63] Comparator 3 If Comparator 3 is evaluated as TRUE, the
input will go high. Otherwise, it will be low.
[64] Comparator 4 If Comparator 4 is evaluated as TRUE, the
input will go high. Otherwise, it will be low.
[65] Comparator 5 If Comparator 5 is evaluated as TRUE, the
input will go high. Otherwise, it will be low.
[70] Logic Rule 0 If Logic Rule 0 is evaluated as TRUE, the
input will go high. Otherwise, it will be low.
[71] Logic Rule 1 If Logic Rule 1 is evaluated as TRUE, the
input will go high. Otherwise, it will be low.
[72] Logic Rule 2 If Logic Rule 2 is evaluated as TRUE, the
input will go high. Otherwise, it will be low.
[73] Logic Rule 3 If Logic Rule 3 is evaluated as TRUE, the
input will go high. Otherwise, it will be low.
[74] Logic Rule 4 If Logic Rule 4 is evaluated as TRUE, the
input will go high. Otherwise, it will be low.
[75] Logic Rule 5 If Logic Rule 5 is evaluated as TRUE, the
input will go high. Otherwise, it will be low.
[80] SL Digital
Output A
SL Controller Action. The input will go high
whenever the Smart Logic Action [38] Set
dig. out. A high is executed. The input will
go low whenever the Smart Logic Action
[32] Set dig. out. A low is executed.
Parameter Descriptions FC 300 Programming Guide
MG.33.MA.22 - VLT
®
is a registered Danfoss trademark 3-83
3

 Loading...
Loading...





