Programmable SyncPos motion controller
MG.10.J8.02 – VLT is a registered Danfoss trade mark
28
■■
■■
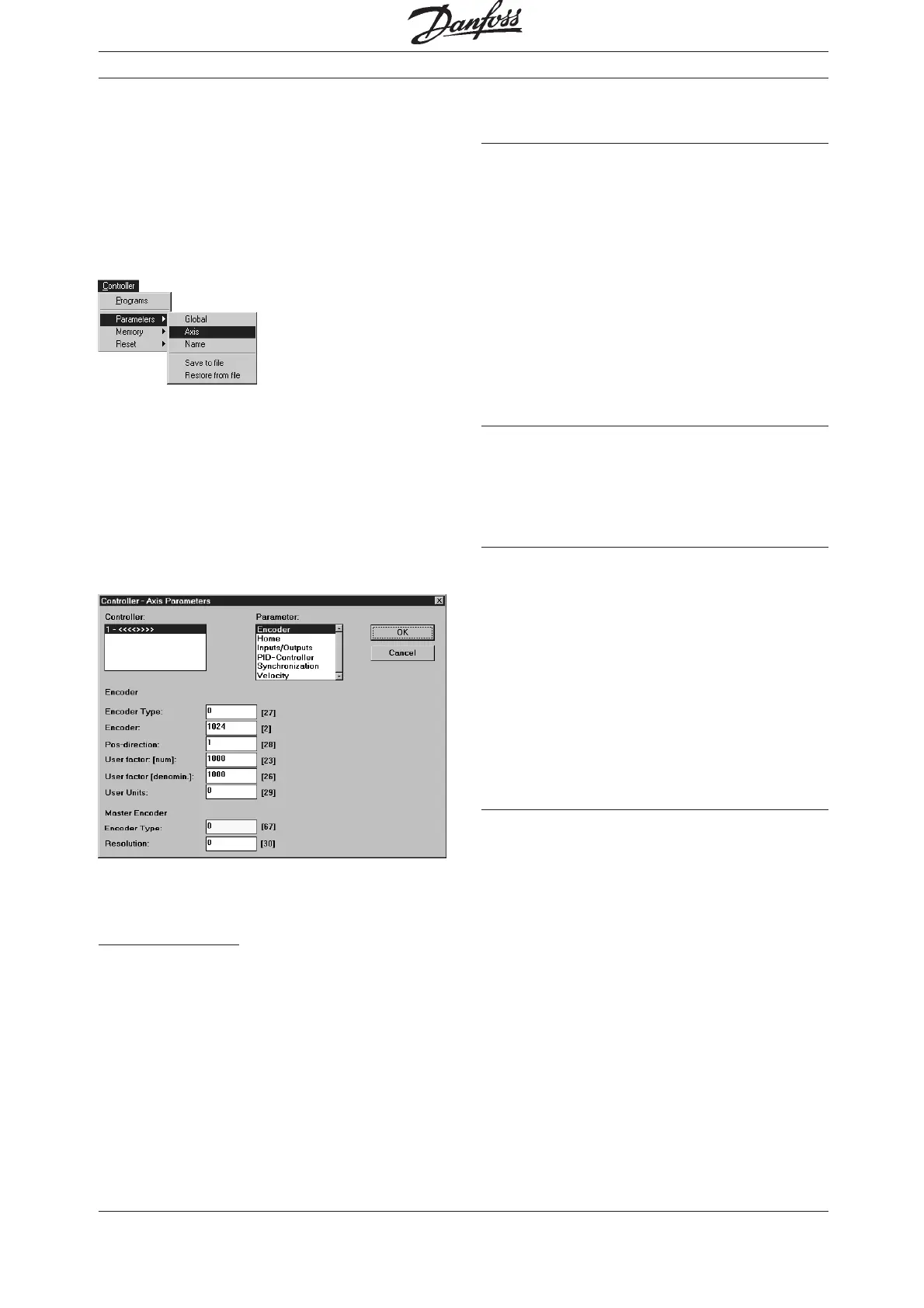
■ Setting of SyncPos parameters
The following parameters must always be checked
and if necessary adjusted. Depending on the
requirements of the application it might be neces-
sary to adjust other parameters as well.
For the other parameters you can use the factory
settings at first and then optimize the controller as
needed at a later point in time with a "TESTRUN".
Click on "CONTROLLER"
→→
→→
→ "PARAMETER" →
"AXIS" and select the
VLT, of which you are cur-
rently adjusting the settings.
In the field
Parameter Parameter
Parameter Parameter
Parameter mark the parameter group
that you wish to define, for example
EncoderEncoder
EncoderEncoder
Encoder
, ,
, ,
, and
enter the values in the corresponding fields.
Click on "OK" in order to load the new parameter
values in the VLT and simultaneously save them.
For a detailed description of all global parameters
and axis parameters please refer to the section
Parameter Reference in the chapter Software
Reference; for information concerning the use of
dialog fields refer to Programming with SyncPos in
the section menu "CONTROLLER"
→→
→→
→
"PARAMETERS"
→→
→→
→ "AXIS".
■■
■■
■ Setting of SyncPos parameters: Encoder
ENCODERTYPE (27)
Define the used type of encoder:
0 = incremental
1 = absolute encoder, standard ca. 262 kHz
2 = absolute Encoder, ca. 105 kHz
3 = absolute encoder without overflow (linear) but
with error correction, approx. 262 kHz
4 = absolute encoder without overflow (linear) but
with error correction, approx. 105 kHz
100 … 104 = like 0 … 4, however, the monitoring of
the encoder will then be activated. If the
encoder leads are interrupted, error 92 will be
issued.
ENCODER (2)
Resolution of the encoder in pulses per revolution.
The following 2 parameters are only relevant for
synchronizing applications:
MENCODERTYPE (67)
Define the used master encoder type:
0 = incremental
1 = absolute encoder, standard ca. 262 kHz
2 = absolute encoder, ca. 105 kHz
6 = The master position is not read by the
encoder; instead, it is set with the system
variable SYSVAR[4105].
100 … 102 = like 0 … 2, however, the monitoring of
the encoder will then be activated. If the
encoder leads are interrupted, option error 92
will be issued
MENCODER (30)
Resolution of the master encoder in pulses per
revolution.
Starting the SyncPos motion controller step-by-step