Revision May, 2018 6-1
Chapter 6 Control Modes of
Operation
6.1 Selection of Operation Mode
Three basic operation modes are provided in this servo drive, position, speed and torque.
Users can use single mode (only in one-mode control) and dual mode to control.
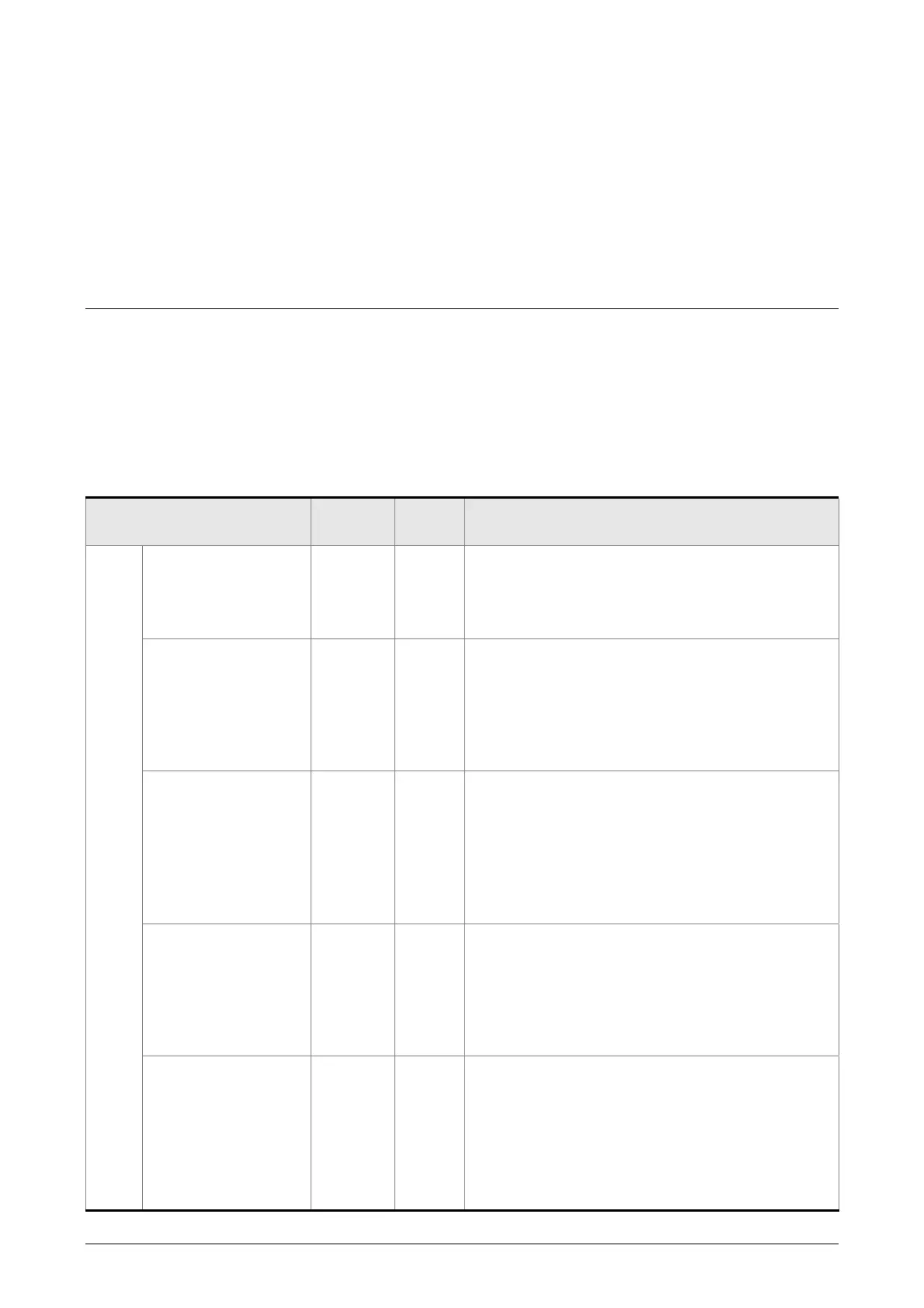
The following table lists all operation mode and description.
Mode Name
Short
Name
Setting
Code
Description
Single
Mode
Position mode
(Terminal input)
PT 00
The servo drive receives position command
and commands the motor to the target
position. The position command is input via
terminal block and receives pulse signal.
Speed Mode S 02
The servo drive receives speed command
and commands the motor to the target
speed. The speed command can be issued
by register (3 sets of registers in total) or the
external analog voltage (-10V ~ +10V). DI
signal is used to select the command source.
Speed mode
(No analog input)
Sz 04
The servo drive receives speed command
and commands the motor to the target
speed. The speed command is issued by
register (3 sets of registers in total) and
cannot be issued by the external terminal
block. DI signal is used to select the
command source.
Torque mode T 03
The servo drive receives torque command
and commands the motor to the target
torque. The torque command can be issued
by register (3 sets of registers in total) or the
external analog voltage (-10V ~ +10V). DI
signal is used to select the command source.
Torque mode
(No analog input)
Tz 05
The servo drive receives torque command
and commands the motor to the target
torque. The torque command can be issued
by register (3 sets of registers in total) and
cannot be issued by the external terminal
block. DI signal is used to select the
command source.
 Loading...
Loading...


