Chapter 12 Description of Parameter Settings|CFP2000 Series
12.1-08-1
08 High-function PID Parameters This parameter can be set during operation.
Input Terminal for PID Feedback
Factory Setting:0
Settings 0: No function
1: Negative PID feedback: on analogue input acc. To setting 5 of Pr. 03-00 to
Pr.03-02.
2~3:
Reserved
4: Positive PID feedback from external terminal AVI (Pr.03-00)
5~8: Reserved
Negative feedback means: +target value – feedback. It is used for the detection value will be
increased by increasing the output frequency.
When Pr.03-00 to Pr.03-02 has the same setting, then the AVI will be the prioritized selection.
Positive feedback means: -target value + feedback. It is used for the detection value will be
decreased by increasing the output frequency.
When Pr.08-00≠7 neither ≠8, input value is disabled. The value of the setting remains the same
after the drive is off.
Common applications for PID control
; Flow control: A flow sensor is used to feedback the flow data and performs accurate flow
control.
; Pressure control: A pressure sensor is used to feedback the pressure data and performs
precise pressure control.
; Air volume control: An air volume sensor is used to feedback the air volume data to have
excellent air volume regulation.
; Temperature control: A thermocouple or thermistor is used to feedback temperature data
for comfortable temperature control.
; Speed control: A speed sensor or encoder is used to feedback motor shaft speed or input
another machines speed as a target value for closed loop speed control of master-slave
operation. Pr.10.00 sets the PID set point source (target value).
; PID control operates with the feedback signal as set by Pr.10.01 either 0~+10V voltage or
4-20mA current.
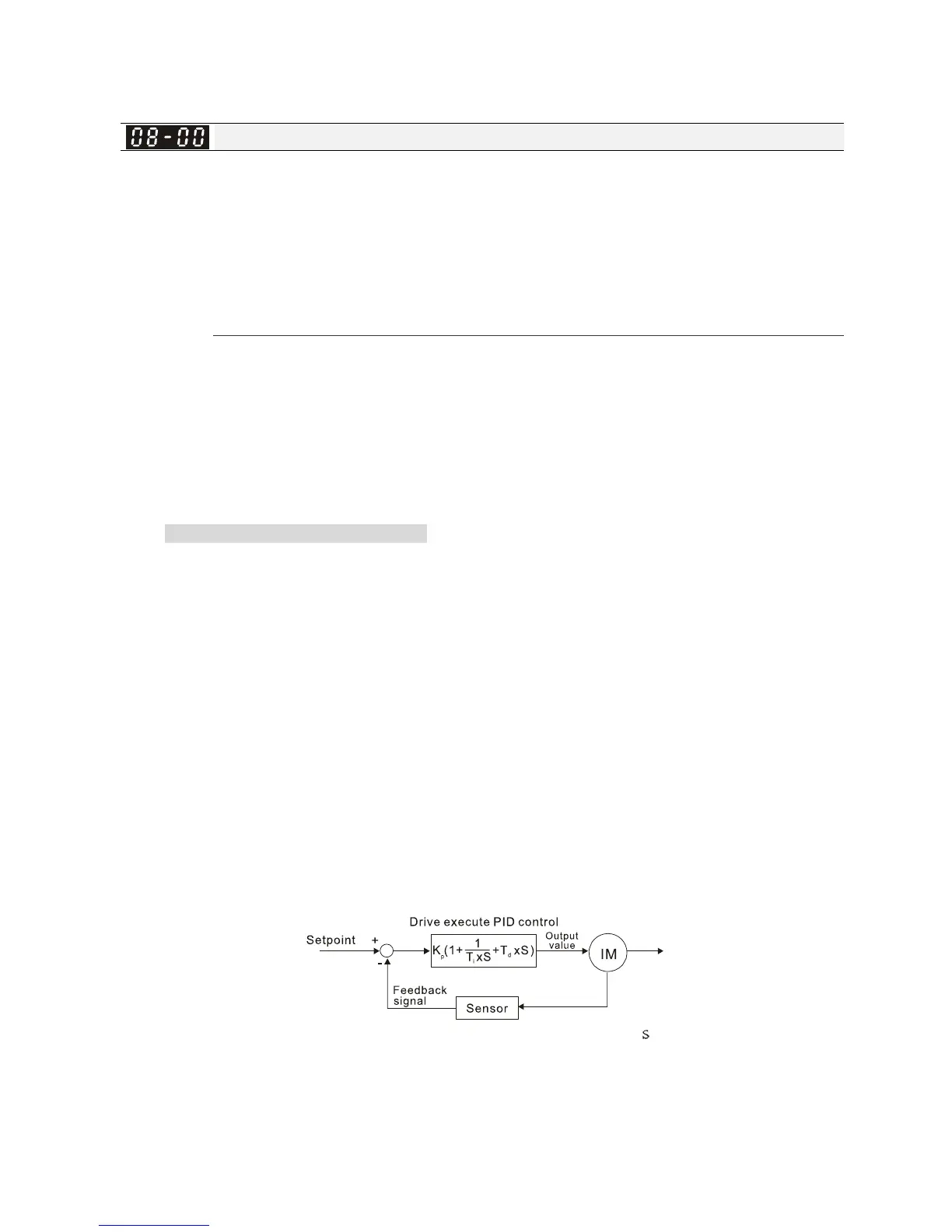
PID control loop:
p
K : Proportional gain(P)
i
T : Integral time(I)
d
T : Derivative control(D) : Operator
Concept of PID control
1. Proportional gain(P):
the output is proportional to input. With only proportional gain control, there will always be
a steady-state error.