MAVIC 2 ENTERPRISE Advanced
User Manual
©
2021 DJI All Rights Reserved.
19
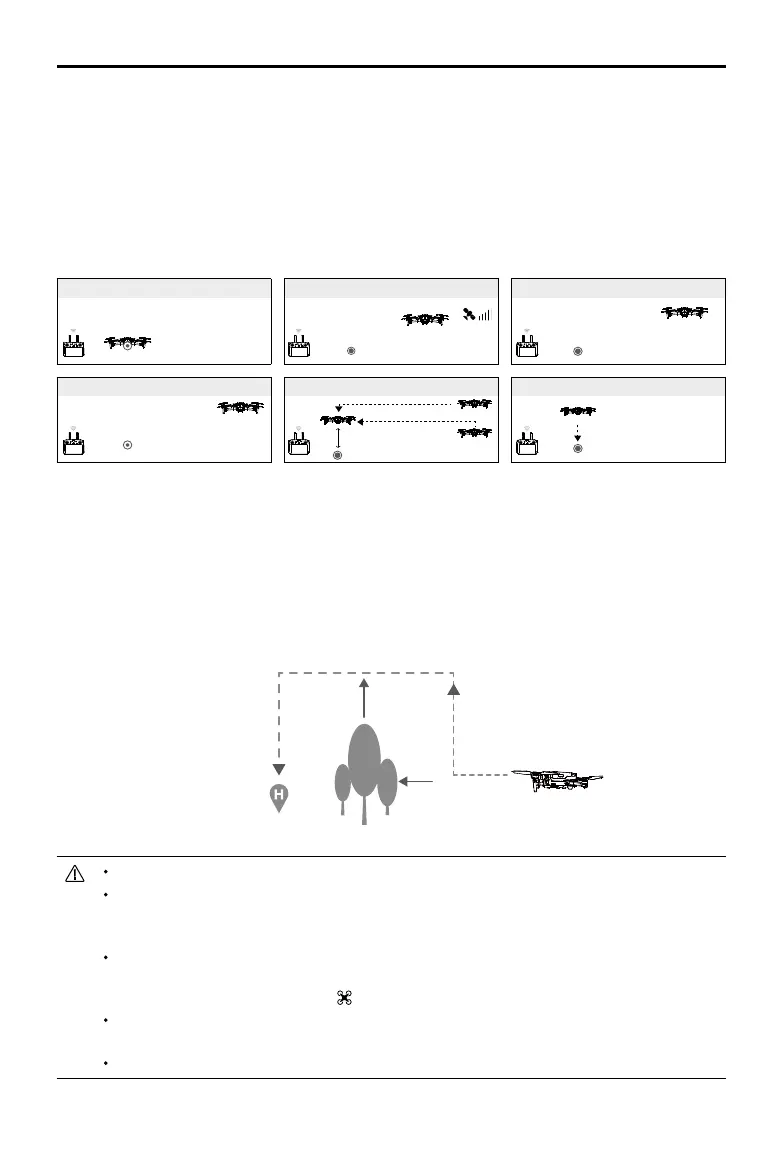
RTH Illustration
Obstacle Avoidance During RTH
Provided that lighting conditions are sufficient for the Forward and Backward Vision Systems to
operate, the aircraft senses and actively attempts to avoid obstacles during RTH. The obstacle
avoidance procedure is as follows:
1. The aircraft decelerates when an obstacle is sensed.
2. The aircraft stops and hovers and then ascends until no obstacle is sensed.
3. The RTH procedure resumes and the aircraft ies to the Home Point at the new altitude.
The aircraft cannot return to the Home Point if the GPS signal is weak or unavailable.
In Smart RTH and Low Battery RTH, the aircraft automatically ascends to an altitude of 65 ft
(20 m). Once the altitude is 65 ft (20 m) or higher, move the throttle stick to make the aircraft
stop ascending and fly to the Home Point at its current altitude.
The aircraft cannot avoid obstacles during Failsafe RTH if the Forward and Backward Vision
Systems are unavailable. It is important to set a suitable RTH Altitude before each ight. To set the
RTH altitude, open DJI Pilot, and tap
.
During RTH, the orientation and direction of the aircraft cannot be controlled, but the remote
controller or DJI Pilot can be used to control the speed and altitude.
During RTH, obstacles on either side of the aircraft cannot be detected or avoided.
b. If the aircraft is between 5 and 20 m from the Home Point when RTH is initiated, the aircraft
flies back at the current altitude. If the current altitude is less than 2 m, the aircraft will first
ascend to 2 m and fly to the Home Point at a speed of 3 m/s. If RTH at Current Altitude is
disabled, the aircraft lands immediately.
c. If the aircraft is less than 5 m from the Home Point when RTH is initiated, it lands immediately.
3. After reaching the Home Point, the aircraft lands and the motors stop.
1 Record Home Point 2 Conrming Home Point
4 Signal Lost for Extended Time
×
5
RTH (adjustable altitude)
Height over HP > Failsafe Altitude
Elevate to Failsafe Altitude
Height over HP≤Failsafe Altitude
Failsafe Altitude
×
6 Landing
×
3 Remote Controller Signal Lost
×
 Loading...
Loading...









