30 Commander SK Getting Started Guide
www.controltechniques.com Issue Number: 9
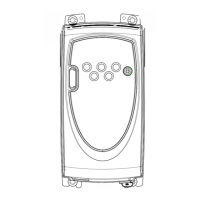
Figure 6-8 Pr 05 = Pid
When Pr 05 is set to Pid, the following parameters are made available for adjustment:
•Pr 61: PID proportional gain
•Pr 62: PID integral gain
•Pr 63: PID feedback invert
•Pr 64: PID high limit (%)
•Pr 65: PID low limit (%)
•Pr 66: PID output (%)
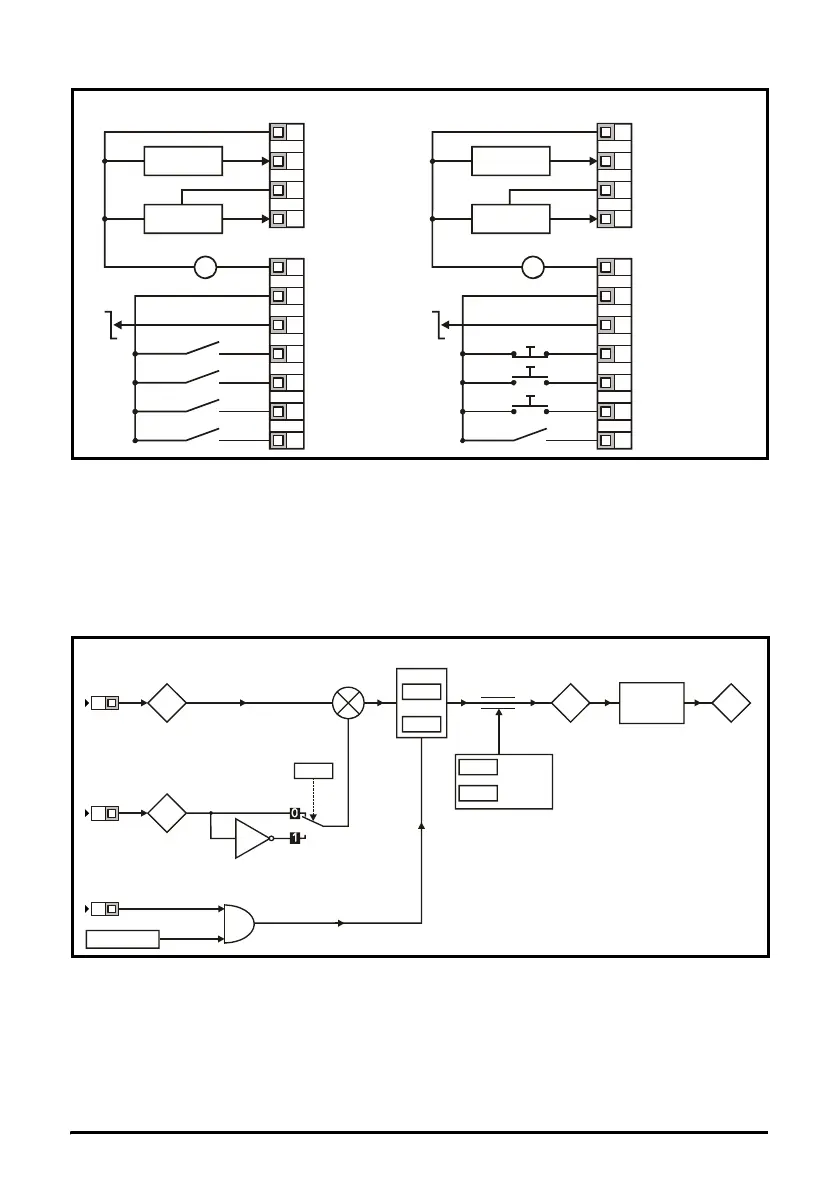
Figure 6-9 PID logic diagram
+24V output
Drive Enable/Reset
Run Forward
Run Reverse
4-20mA PID
feedback input
V
_
+
+24V
0V
Eur USA
Analog output
(motor speed)
Digital output
(zero speed)
PID feedback input
PID reference input
PID enable
0-10V PID
reference input
0V
/Stop
Run
Jog
4-20mA PID
feedback input
PID feedback input
T1
T2
T3
T4
B1
B2
B3
B4
B5
B6
B7
95
94
%
T4
T2
x(-1)
63
Invert
61
P Gain
62
I Gain
PID reference
input
%
PID feedback
input
B7
PID enable
&
Drive healthy
64
PID high
limit
65
PID low
limit
66
%
81