1. Safety
32 Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.15
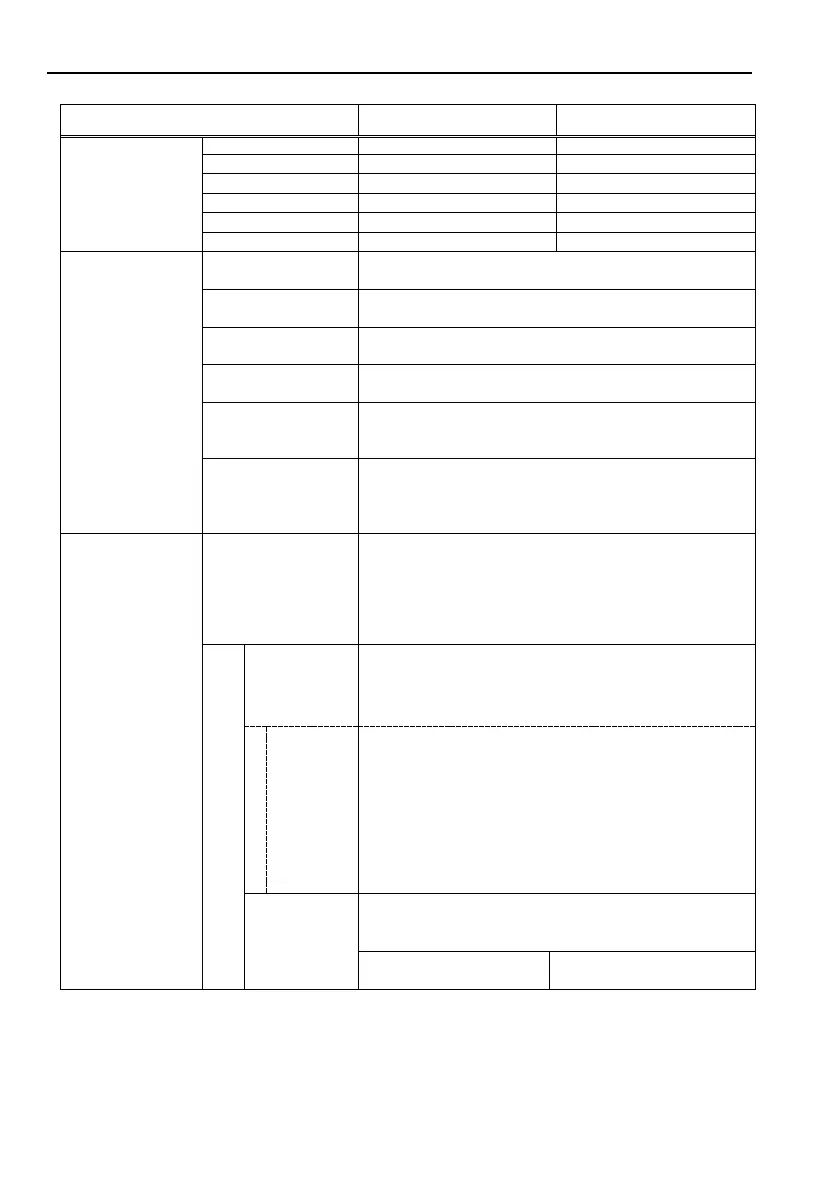
Item
Assignable Value
( ) Default values
0,175 to (1,175) to 3,175
0,275 to (2,275) to 6,275
Motion Control
EPSON RC+ 7.0
SPEL+ (multi-tasking robot language)
Joint Control
Standard 4 joints simultaneous control
Digital AC servo control
Positioning Control
PTP (Point-To-Point control)
CP (Continuous Path control)
Speed Control
PTP motion : Programmable in the range of 1 to 100%
CP motion : Programmable (Actual value to be
Acceleration/
Deceleration Control
PTP motion : Programmable in the range of 1 to 100%;
Automatic
CP motion : Programmable (Actual value to be
External Interface
EMERGENCY
Redundant (Category 3) Supported for internal/external
power supply
Safeguard System:
Redundant (Category 3) Supported for external power
I/O
Standard I/O
(Rear side of
Manipulator)
Input: 18 points
Output: 12 points
Non-polar, Supported for both Sink and Source
Remote
I/O
(Remote
functions
are applied
to
Standard
Input: 8 points
Program: 3 points
Start, Stop, Pause, Continue, Reset
Output: 8 points
Ready, Running, Paused, ErrorEStopOn, SafeguardOn,
SError, Warning
Hand I/O
(Upper side
of Arm #2)
Output: 4 points
Non-polar, Supported for both Sink and Source
Power supply:
up to 24V 500mA
Power supply:
up to 24V 700mA

 Loading...
Loading...






