19
4.0 Structure and function
4.6.4 Encoder
E design only
Dual hall sensor for incremental position feedback. It out-
puts signals when the actuator is moving outwards and in-
wardsrespectively.Theoutputsignals,channel1and2,are
±90°,seethegurebelow.Theelectricalspecicationason
the data sheet.
The supply voltage to the encoder must be in the range 4 to
20VDC.
Fig. 17
Encoder
Hall 1
Hall 2
Hall 1
Hall 2
Signal CCW extension
Signal CW retraction
Resolution: distance between rising edge and falling edge.
4.6.5 Termination resistor integrated
S design
The termination resistor can be integrated in the actuator.
Thus there is no need to connect termination resistor at CAN
circuit.
The termination resistor value is 120 ohm.
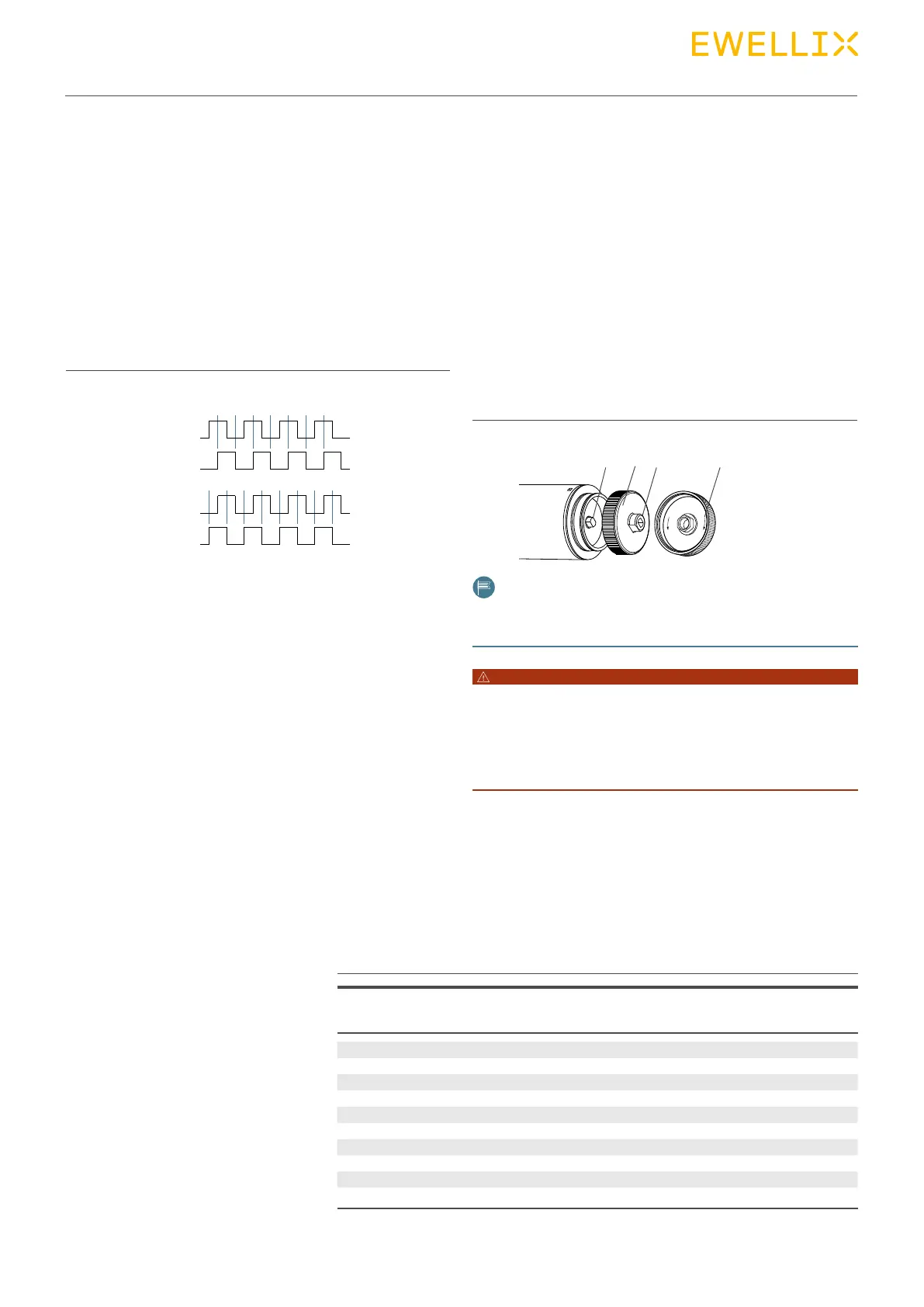
4.6.6 Manual Override
Manual override option provides a solution to move the push
tube manually and without tool when power failure. The un-
screwed cover can be used as a hand crank. With the
CAHB-2xE,apowertoolcanbeusedtodrivethecoverby
the hexagon head. Don’t use a power tool with the manual
override of the CAHB-2xS. Please control the torque and
speednottoexceedthemaximumvaluespeciedon
table 1.
Thestructureandoperatinginstructionseethegurebelow.
Release the motor cover (1). Use the slot (2) to
rotate the motor shaft (3) in the proper direction
R
e
t
r
a
c
t
i
o
n
E
x
t
e
n
s
i
o
n
1 23
Inner side of motor front
Fig. 18
Manual override
NOTE
The directions showed on the inner side of the motor front
represent the extending or retracting of actuator.
DANGER
Danger of injury caused by moving components!
Rotating components can cause severe injury.
Therefore:
• Do not operate the manual override deice when actuator cable is
connecting with power supplier.
Actuator type Torque with load Max. torque Max. speed
Information (Nm) (Nm) (rpm)
CAHB-20-.1S 1,4 1,5 1600
CAHB-20-.2S 1,1 1,2 1600
CAHB-20-.3S 0,58 1,0 1600
CAHB-21-.1S 0,65 1,0 1600
CAHB-21-.2S 0,71 1,0 1600
CAHB-21-.3S 0,53 1,0 1600
CAHB-22-.1S 0,71 1,0 1600
CAHB-22-.2S 0,75 1,0 1600
CAHB-22-.3S 0,74 1,0 1600
CAHB-22-.4S 0,63 1,0 1600
Tab. 1

 Loading...
Loading...