X 3
X 2
C H O K E X P S
1 0 m m ² ( X P S - 2 5 )
C H 2
X P S - X X
R E G E N E R A T I V E
P O W E R
S U P P L Y
R i
L 3
3 x 4 0 0 / 4 6 0 V A C
L 1
P O W E R
B U S D C
I N T E R N A L
B U S
+ 2 4 V D C
F A G O R
C N C
I N
O U T
C H A S S I S
D R . S O K
E R R O R R E S E T
K A 3
G N D
S P E E D E N A B L E
D R I V E E N A B L E
D R . Z O K
G N D
G N D
K A 3
O N
2 . 5 A
1
O U T
1
S C D
C O M P A C T
D R I V E
M O D U L E
1
2
3
2 x 4 0 0 / 4 6 0 V A C
L 1
3 x 4 0 0 / 4 6 0 V A C
T
8
9
O U T 2
O U T 2
X 6
W
2
O U T
I N
X 1
A X D
A X I S
D R I V E
X
X 1
3
O U T
I N
M O T O R
2 x 4 0 0 / 4 6 0 V A C
L 2
1
2
3
L 2
X 1
O N
E R R O R R E S E T
K A 2
S Y S T E M S P E E D E N A B L E
S Y S T E M O K
G N D
+ 2 4 V D C *
X 2
X 4
1
X 2
C H A S S I S
D R I V E E N A B L E
S P E E D E N A B L E
D R . X O K
X 2
1
L +
L -
L +
L -
L+
L-
R e
L +
Z
S
G N D
D R I V E E N A B L E
S P E E D E N A B L E
A X D
A X I S
D R I V E
C H 1
5 0 m m ² ( X P S - 6 5 )
+ 2 4 V D C
+ 2 4 V D C
L 2
L 3
L 1
L 2
L 1
L 2
X 1
I N
( F ) f u s e
S
R
V
U
W
V
U
M O T O R
L 1
L 2
L 1
L 1
L 2
L 3
2
3
1
2
3
4
5
6
7
8
2 . 5 A
( F ) f u s e
1
3
5
6
7
2
3
4
5
6
7
8
2
3
4
5
6
7
8
9
1 0
1
C A N L ·
2
·
S H I E L D ·
3
·
C A N H ·
4
·
+ 2 4 V D C
O N
K A 2
E R R O R R E S E T
S Y S T E M S P E E D E N A B L E
G N D
S Y S T E M O K
+ 2 4 V D C *
C H A S S I S
K A 3
G N D
G N D
D R I V E E N A B L E
S P E E D E N A B L E
D R . X O K
D R I V E E N A B L E
S P E E D E N A B L E
D R . Z O K
G N D
+ 2 4 V D C
O N
K A 3
S P E E D E N A B L E
E R R O R R E S E T
D R I V E E N A B L E
G N D
D R . S O K
C H A S S I S
F A G O R
C N C
2 x 4 0 0 / 4 6 0 V A C
3 x 4 0 0 / 4 6 0 V A C
1
0
1
0
4
8
N O D E
S E L E C T
8
9
0
4
8
N O D E
S E L E C T
0
4
8
N O D E
S E L E C T
X 1
1
0
1
1
0
1
7
1
1
1
1
X 2
L+
L-
L +
L -
L +
L -
C H O K E X P S
1 0 m m ² ( X P S - 2 5 )
5 0 m m ² ( X P S - 6 5 )
C H 2
C H 1
X P S - X X
R E G E N E R A T I V E
P O W E R
S U P P L Y
R i
R e
L +
L 1
L 2
L 3
X 3
L 3
L 2
L 1
3 x 4 0 0 / 4 6 0 V A C
2 x 4 0 0 / 4 6 0 V A C
L 2
L 1
1
2
3
L 2
L 1
X 1
I N T E R N A L
B U S
P O W E R
B U S D C
X
A X D
A X I S
D R I V E
W
V
U
W
V
U
M O T O RM O T O R
O U T 2
O U T 2
X 6
T
S
R
X 1
1
L 1
L 2
L 2
L 1
A X D
A X I S
D R I V E
Z
S C D
C O M P A C T
D R I V E
M O D U L E
S
2 . 5 A
( F ) f u s e
2 . 5 A
( F ) f u s e
X 2
X 4
X 2
X 1
2
3
4
5
6
7
8
2
3
+ 2 4 V D C
6
5
3
1
2
3
4
5
6
7
8
2
3
4
5
6
7
8
9
1 0
X 2
2
3
L 1
L 2
L 3
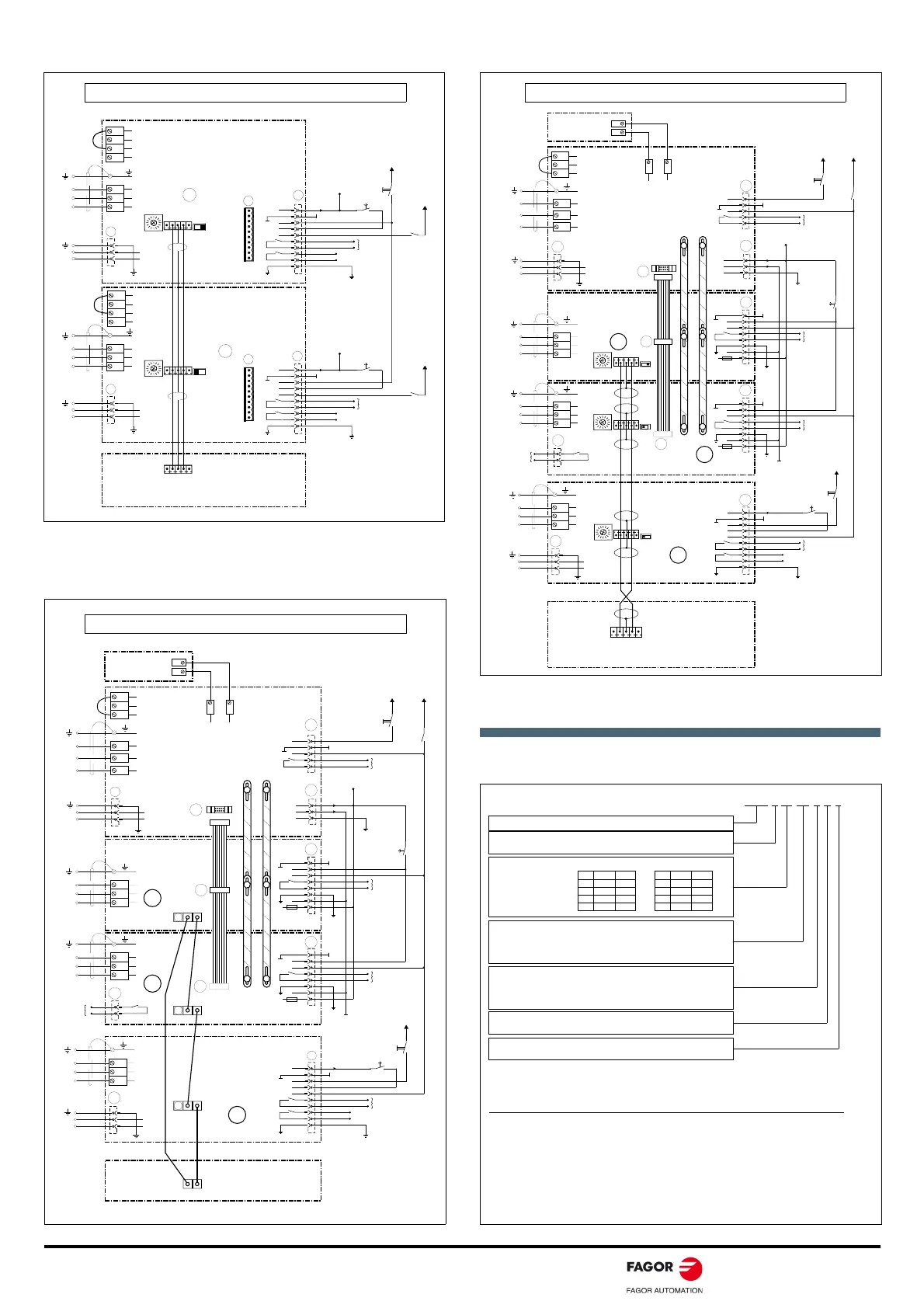
AXIS COMPACT DRIVE
A1
B
None
CURRENT
(A)
Irated / Ipeak
for IGBT's switching
frequencies (fc)
at 4|8 kHz
for fc = 4 kHz
08
15
25
35
50
Examples.
ACD 1.25-C0-0
Compact axis drive, size 1, with a peak current of 25 A at 4 kHz
with ·CAN· board, with no additional feedback board and with ·CAPMOTOR-1· motor
feedback board. Line voltage: 400/460 V AC
ACD 1.25-C0-0-B
Compact axis drive, size 1, with a peak current of 25 A at 4 kHz
with ·CAN· board, with no additional feedback board and with ·CAPMOTOR-2 motor
feedback board. Line voltage: 400/460 V AC.
Important note.
Models with CAN interface (C0) cannot have an encoder simulator
board or the direct feedback board. In other words, there are no sales models like
ACD X.XX-C0-1-X-X or ACD X.XX-C0-2-X-X.
S0
SI
C0
Analog I/O
0
2
Encoder simulator
Direct feedback
1
CAPMOTOR-1
CAPMOTOR-2
SERCOS
SERCOS and Analog I/O
CAN
INTERFACE
ADDITIONAL
FEEDBACK
None
MOTOR
FEEDBACK
SIZE
weidth (models)
2
77 mm (08/15/25)
177 mm (35/50)
1
AXIS COMPACT DRIVE, ACD
Example:
ACD 1.25-S0-0-B-L
4.0
7.5
12.5
17.5
25.0
8.0
15.0
25.0
35.0
50.0
for fc = 8 kHz
08
15
25
35
50
4.0
7.5
9.5
17.5
20.0
8.0
15.0
19.0
35.0
40.0
3
GAP CTRL
LINE
ACD 1.25-S0-0-B-L
Compact axis drive, size 1, with a peak current of 25 A at 4 kHz
with ·SERCOS· board, with no additional feedback board and with ·CAPMOTOR-2·
motor feedback board. Line voltage: 200/240 V AC.
VOLTAGE
400/460 V AC
200/240 V AC
- L
None
·available shortly·