55
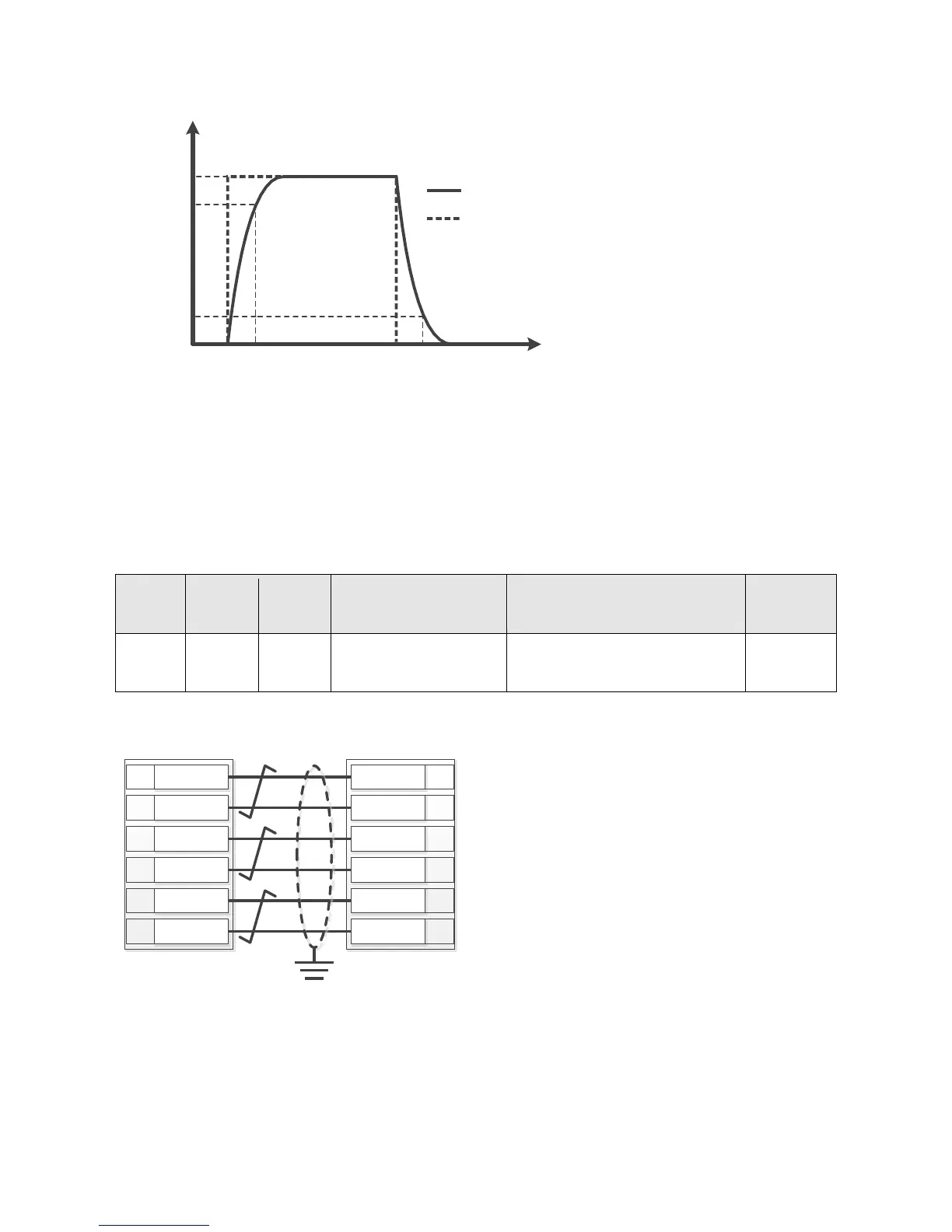
PD_filter effect principle:
Position
Command
P
Px0.707
Px0.293
Time
Command After Filter
Command Before Filter
Filter TimeFilter Time
Figure 6-6: Pulse filter principle
6.5.1 Master-slave mode
The master-slave mode is a type of pulse train mode – PD_CW = 2. The pulse input for the slave controller
comes from an external incremental encoder or the encoder output of the master controller.
Encoder output (ENCO) signal resolution of the master controller is specified via Encoder_Out_Res.
Table 6-17: Master-slave mode
Specify encoder output pulse number
for 1 motor encoder revolution
For slave controller parameter setting, please refer to upper introduction of pulse mode.
Wiring between the master and the slave is as follows:
ENCO_A34
ENCO_/A36
ENCO_B30
ENCO_/B32
ENCO_Z26
ENCO_/Z28
MA+ 27
MA- 29
MB+ 31
MB- 33
MZ+ 35
MZ- 18
Figure 6-7: Master slave wiring (example: from one CMMB controller to another)
6.6 Homing mode (6)
For some applications, the system needs to start from the same position every time after power on. In the
homing mode, the user can specify the system’s home position and a zero (starting) position.

 Loading...
Loading...








