6. Setting Parameters
Festo P.BE-CMMP-CO-SW-EN 0708NH 123
6.16 Brake triggering
6.16.1 Overview
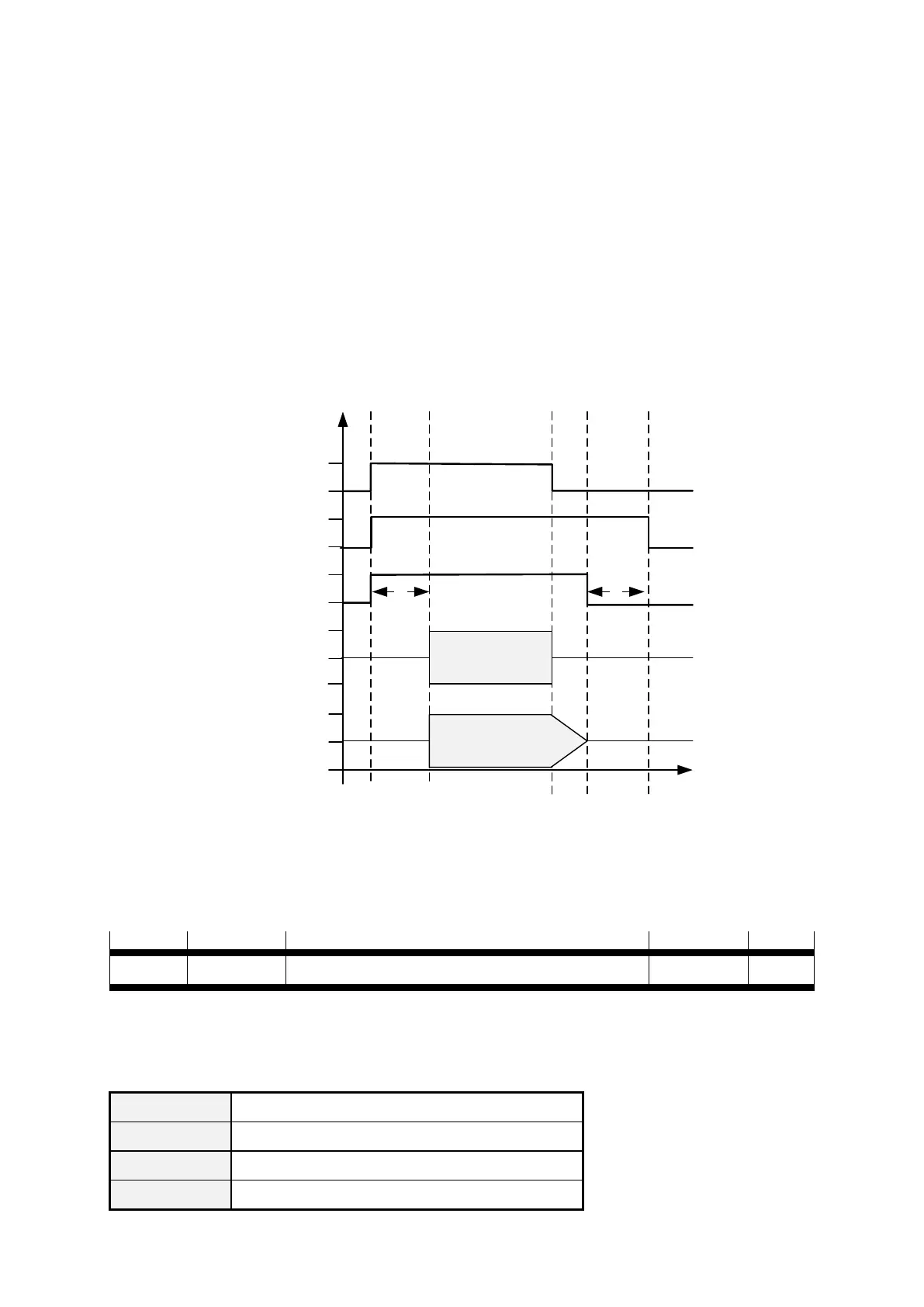
The following objects are used to parameterise how the motor controller triggers the
holding brake, if integrated in the motor. The holding brake is always enabled as soon as
the controller enable is switched on. For holding brakes with high mechanical inertia, a
delay time can be parameterised so that the holding brake intervenes before the final
stage is switched off (sagging of vertical axes). This deceleration is parameterised with the
object brake_delay_time. As can be seen in the sketch, when the controller enable is
switched on, the speed command value is released only after the brake_delay_time and,
when the controller enable is switched off, switch-off is delayed by this time.
Speed command
value
Internal
controller release
Speed actual value
DIN5
Controller release
Holding brake
released
0
1
0
+
0
-
+
0
-
1
1
0
t
F
t
F
t
F
: Run delay
Fig. 6.8: Function of the brake delay (with speed control/positioning)
6.16.2 Description of the Objects
Object 6510
h
_ 18
h
: brake_delay_time
With the object brake_delay_time, the brake delay time can be parameterised.

 Loading...
Loading...










