7. Device control
144 Festo P.BE-CMMP-CO-SW-EN 0708NH
Condition of the motor controller (see Tab. 7.4).
(These bits must be evaluated together)
Condition of the motor controller (see Tab. 7.4).
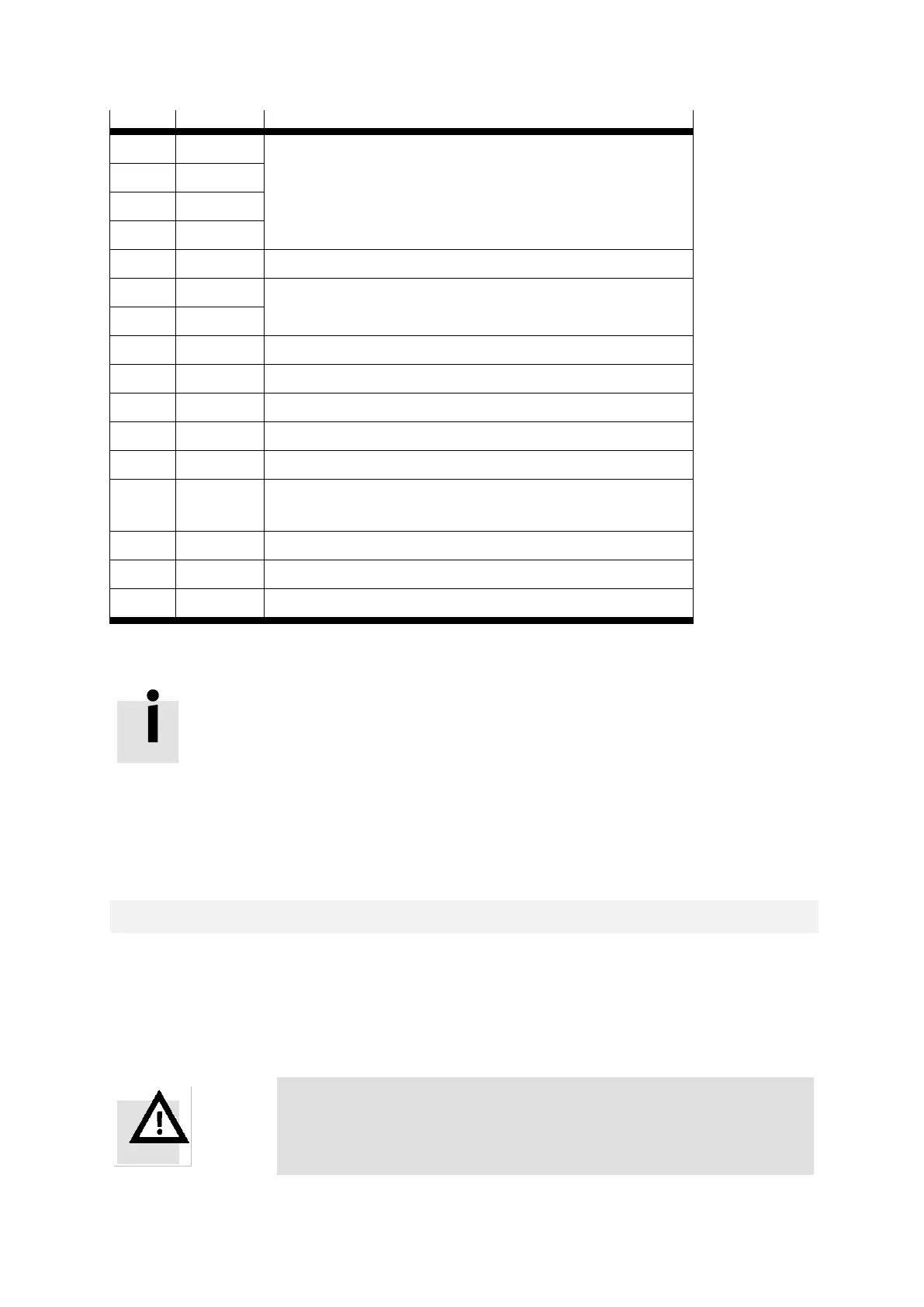
set_point_acknowledge / speed_0 / homing_attained /
ip_mode_active
following_error / homing_error
Tab. 7.5: Bit arrangement in the statusword
All bits of the statusword are unbuffered. They represent the
current device status.
Besides the motor controller status, various events are displayed in the statusword, that
is, to each bit is assigned a specific event, such as contouring error. The individual bits
have the following meaning thereby:
This bit is set when the final stage transistors are switched on.
Applies when in the object 6510
h
_ F0
h
(compatibility_control)
bit 7 is set (see chapter 6.2):
This bit is set when the final stage transistors are switched on.
Warning
In case of a defect, the motor can still be under voltage.

 Loading...
Loading...










