53
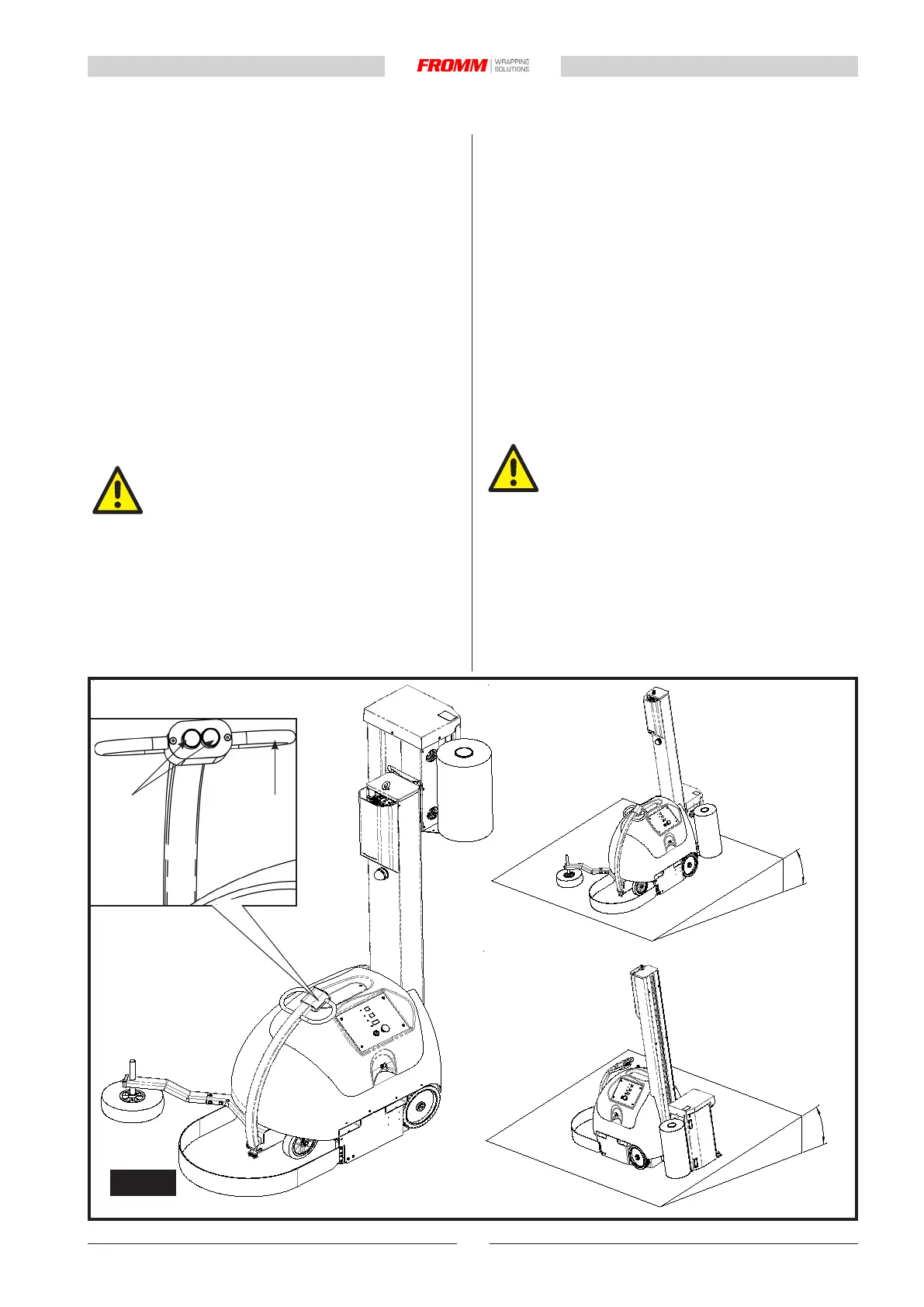
Fig. 5.5
2
1
La molla più tesa comporta:
- Maggiore forza di sterzata;
- Maggiore rigidezza del timone di guida durante le mo-
vimentazioni in manuale;
- Il rischio di spostamento di pallet leggeri su pavimenti
scivolosi.
La molla meno tesa comporta:
- Minore forza di sterzata;
- Minore rigidezza del timone di guida durante le movi-
mentazioni in manuale;
- Il rischio che la macchina non segua correttamente
la sagoma del pallet durante l’avvolgimento ad alta
velocità.
5.5 SPOSTAMENTO MANUALE DELLA
MACCHINA
LA CONDOTTA MANUALE DELLA MAC-
CHINA, PUÒ ESSERE ESEGUITA SOLO
CON CARRELLO COMPLETAMENTE AB-
BASSATO E SU UNA PAVIMENTAZIONE
CON PENDENZA INFERIORE AI 10°.
La macchina può essere movimentata autonomamen-
te per brevi spostamenti all'interno dei reparti di lavoro,
la condotta della macchina viene eseguita da un ope-
ratore per mezzo del timone di guida (1) (Fig. 5.5) e dei
pulsanti di manovra (2) (Fig. 5.5).
A more rigid spring results in:
- Greater steering force
- Greater steering arm rigidity during manual move-
ments
- The risk of lightweight pallets moving on slippery
ooring.
A less rigid spring results in:
- Reduced steering force
- Reduced steering arm rigidity during manual move-
ments
- The risk that the robot does not correctly follow the
outline of the pallet during high-speed wrapping.
5.5 MANUAL MACHINE MOVEMENT
THE MACHINE CAN ONLY BE STEERED
MANUALLY WITH THE CARRIAGE IN
THE FULLY LOWERED POSITION AND
ON FLOORING WITH A SLOPE OF LESS
THAN 10°.
The machine can be moved automatically for short
movements inside the workplace. It is moved by the
operator using the steering arm (1) (Fig. 5.5) and the
movement controls (2) (Fig. 5.5).