26
Issue: 8 (Applies to firmware 2387 6.09 onwards)
Document number: 1390-PS-0039
5.5. Averaging (Digital Data)
There are two digital averaging options: -
5.5.1. G Command Averaging
Using the G Command in association with modes other than M14, M15 and polled modes.
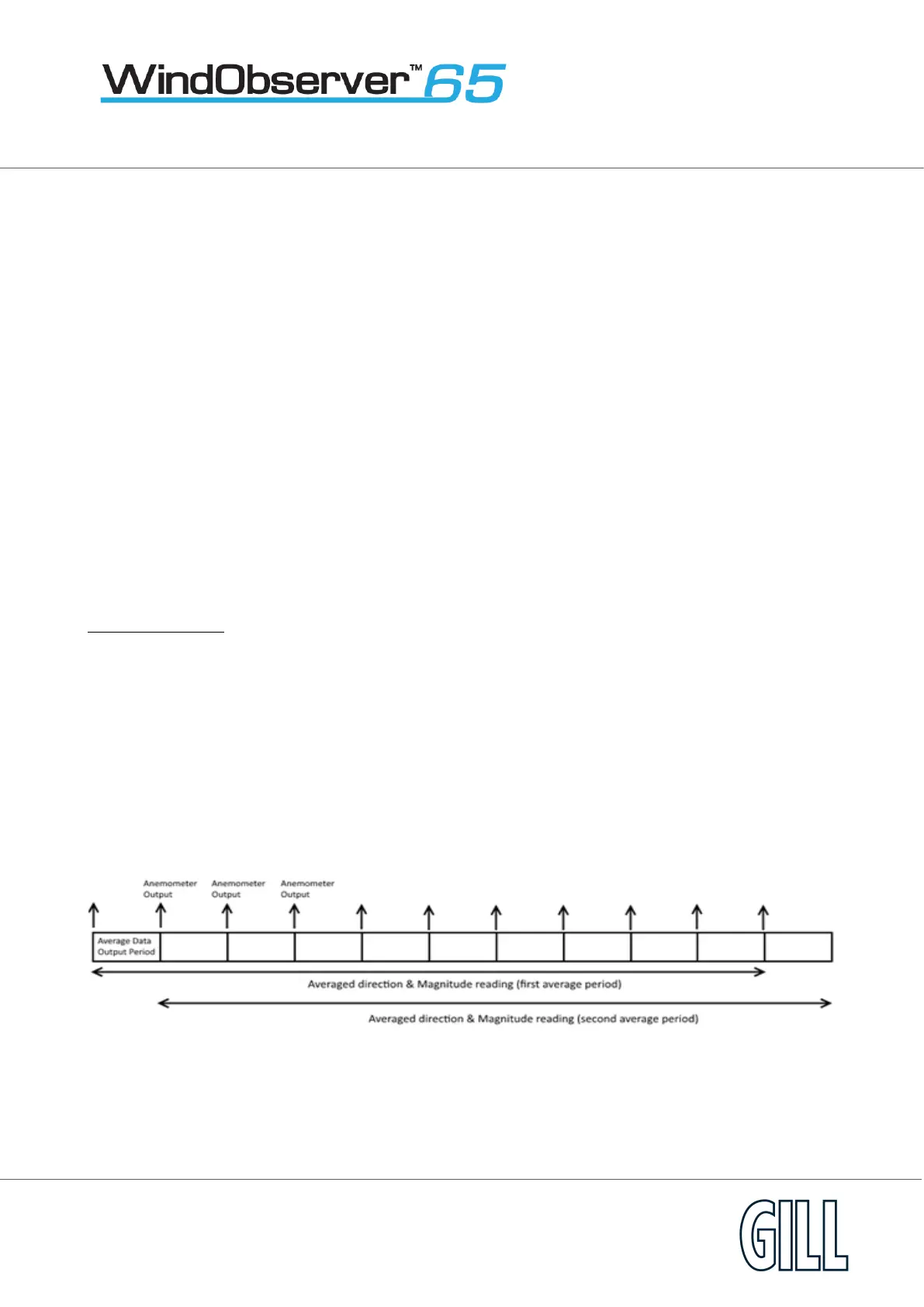
The Averaging Period can be set from zero to 3600 secs. (1 hour). The default setting is zero. When averaging is enabled,
data is output at a rate determined by the averaging period. The data is an average of valid data collected during the
averaging period.
If G is set to zero, then averaging settings will be disabled.
For instance, if the unit is set for G0025 then every 25 seconds there will be a single result output that provides the
average of the wind direction and magnitude data over the last 25 seconds.
A,219,000.78,M,60, 0D
A,202,000.79,M,60, 06
A,207,001.22,M,60, 0C
A,220,000.48,M,60, 04
5.5.2. Road Weather Averaging (RWA)
Modes 14 and 15
The averaging is implemented with reference to the following standard:
• Guide to Meteorological Instruments and Methods of Observation – World Meterological Organization WMO-
No8 seventh edition 2008 ISBN 978-92-63-10008-S
The direction and magnitude outputs are derived from the vector sum of U and V over the RWALONG averaging period
(default 10 minutes in P1).
The gust output is derived from the vector sum of U and V over 3 readings (3 seconds in P1), and the max gust is the
maximum of the gust value over the RWASHORT period (default 60 seconds in P1). The max gust value is reset to zero at
the end of each RWASHORT period.