27
CoboSafe-CBSF 325-2810-012US15
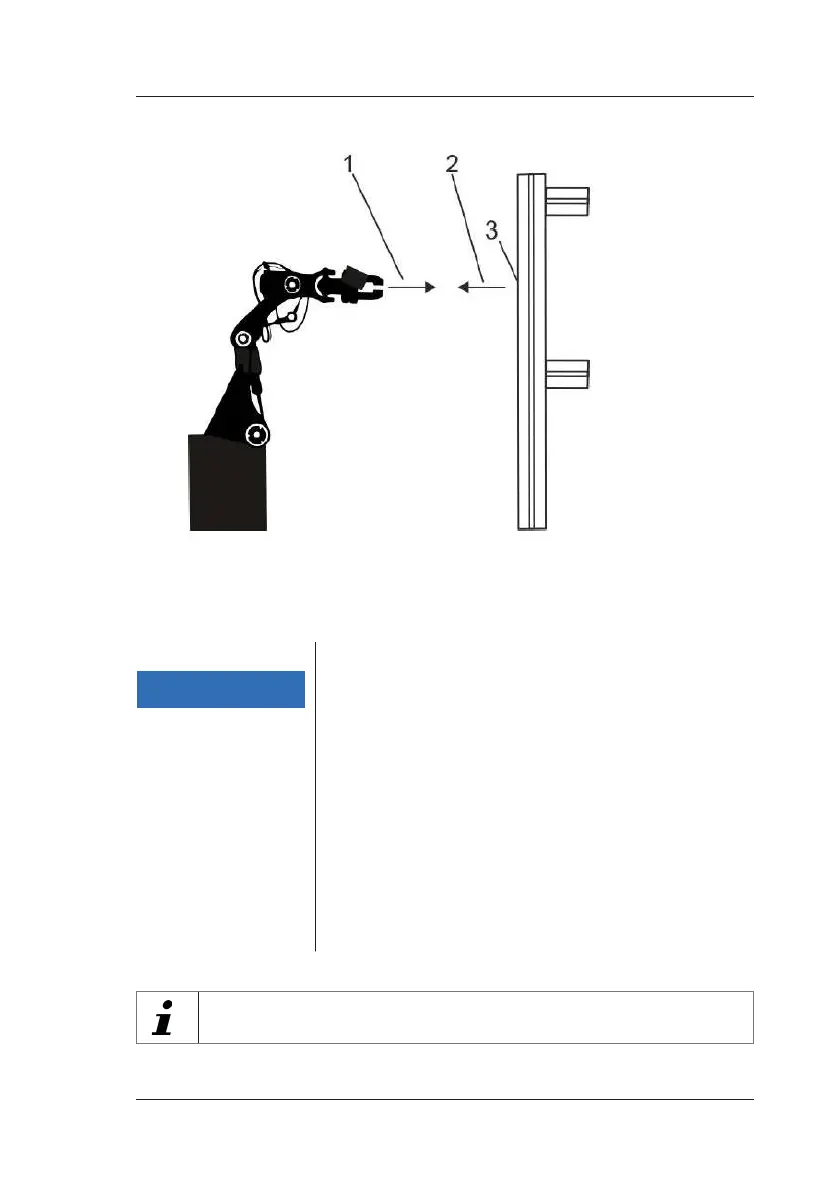
PREPARING FOR MEASUREMENT
Fig. 14: Example: Robot with rail framework for mounting the assembly adapter
10.4 Robot Parameters
Set robot parameters
Material damage due to high collision speeds, forces and pres-
sures!
■ Only combine measurement units as described in this
manual.
■ Carefully plan collisions and document the planning.
■ Design collision kinematics carefully and iteratively.
■ Always test at greatly reduced speeds first.
■ Then slowly increase the speeds.
■ Finally, achieve the intended operating conditions at the
collaboration workstation.
If the robot exceeds the application limits of the force and pressu-
re sensors during the collision, material damage to the measuring
system can result.
Consider robot operation safety settings from ISO/TS 15066.