CHAPTER
2
Specifications
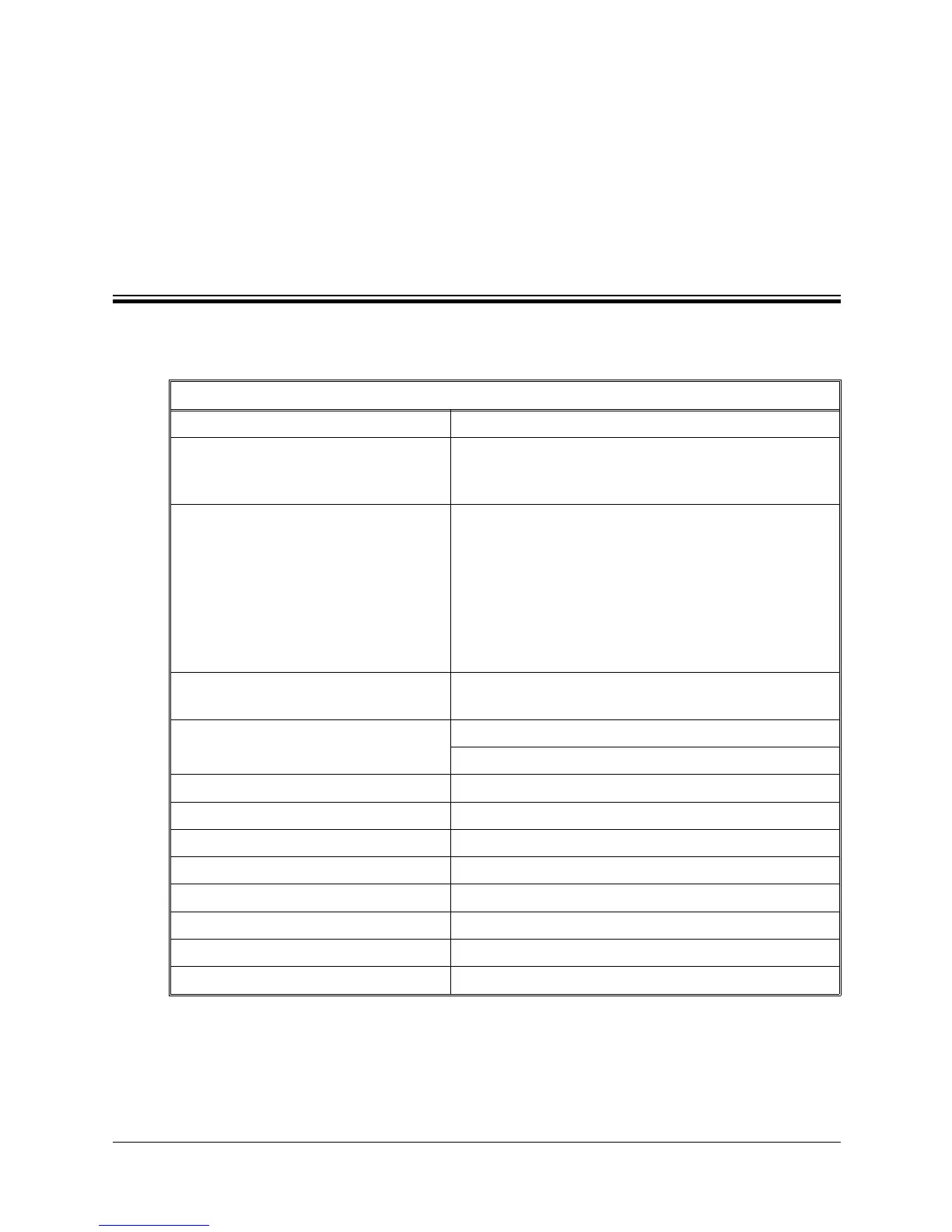
The following table gives the specifications of the SCORA-ER 14 robot arm.
Robot Arm Specifications
Mechanical Structure Horizontal articulated (SCARA)
Arm Length
Link 1
Link 2
270mm (10.6")
230mm (9.0")
Axis Movement Axis Range Effective Speed
Axis 1: Rotation
Axis 2: Rotation
Axis 3: Translation
288° 117°/sec
218° 114°/sec
182mm 211mm/sec
Axis 4: Roll; without gripper cable:
or Roll; with gripper cable:
unrestricted
370°/sec
±
527°
Links 1 and 2 combined 1.5m/sec
Maximum Operating Radius
Minimum 230mm (9.06")
Maximum 500 mm (19.69")
End Effector
Pneumatic Gripper
Electric DC servo Gripper
Hard Home Fixed position on all axes
Feedback Incremental optical encoders with index pulse
Actuators DC servo motors
Transmission Harmonic Drive gears
Maximum Payload 2 kg (4.4 lb.)
Position Repeatability
±
0.05mm (
±
0.002")
Weight 30 kg (66 lb.)
Ambient Operating Temperature 2°–40°C (36°–104°F)
User’s Manual 2 - 1 SCORA-ER 14
9603