Goodrive350-19 series VFD Commissioning
- 57 -
(+) PB
GD350-19 VFD
R
S
T
R
S
T
U
V
W
PG
PE
S1
S2
S3
S4
COM
Brake
output
VFD fault
output
RO1A
RO1B
RO1C
RO2A
RO2B
RO2C
Lifting
Lowering
Fault reset
Upward position limit
Braking resistor
COM
+24V
HDIB
HDIA
M
3~
AI2
+10V
-10V (externally
connected)
PW
+24V
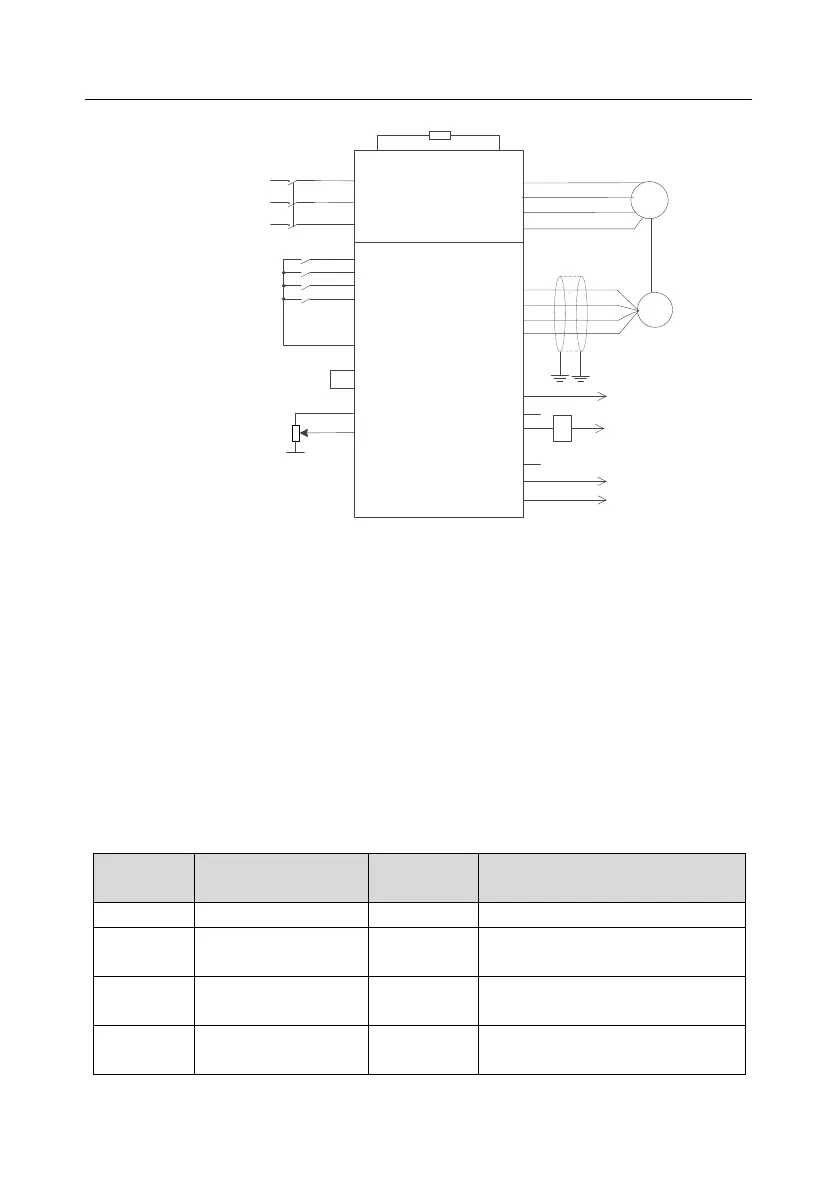
Figure 5.8 Wiring for winching in closed-loop vector control (using analog reference -10V–10V)
5.7.2 Commissioning procedure
1. Check the wiring and ensure the wiring is proper.
2. Set P00.18=1.
3. Set motor nameplate parameters in P02.
4. Set P00.15=2. The keypad displays "-ΓUN-". Press the RUN key to perform static autotuning.
5. Set P90.00=11 to select the closed-loop controlled winching function macro.
6. Perform low-speed trial running.
5.7.3 Macro parameters (P90.00=11)
Table 5.2 Parameter settings for the closed-loop vector controlled winching application macro
(recommended analog reference 0V–10V)
Closed-loop vector control mode
Setting channel of A
frequency command
Setting channel of B
frequency command

 Loading...
Loading...

