Goodrive350-19 series VFD Commissioning
- 80 -
Slave parameters:
Setting channel of A
frequency command
Reduction ratio of
droop control
2. Terminal master/slave mode b
The master adopts the speed control mode and sends the torque current to the slave AI1 terminal
through the AO1 terminal. The slave adopts the torque control mode and the torque reference is set
by the AI1 terminal.
Master parameters:
0–47
22: Torque current (relative to three times the
motor rated current)
Slave parameters:
Torque setting mode
selection
Note: When the terminal master/slave function is used, commissioning is unrelated to P28.
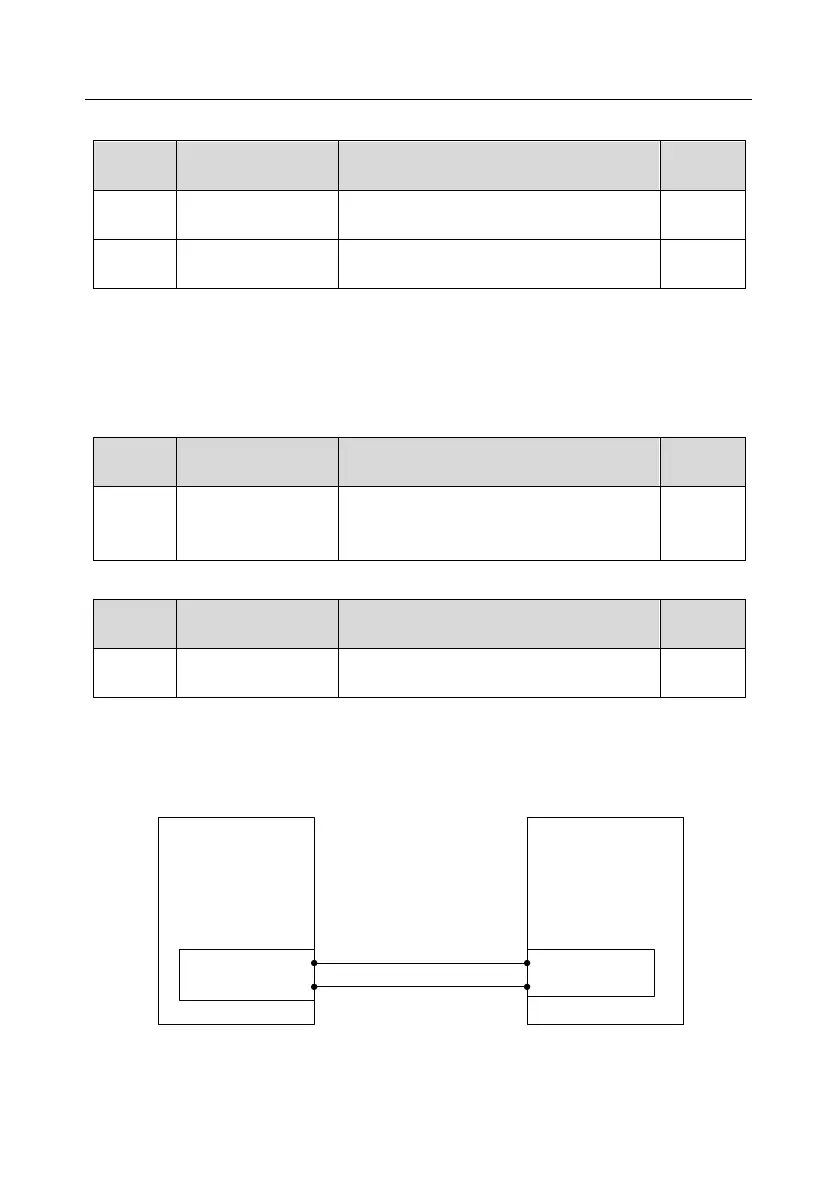
5.10.3 Communication master/slave function
The VFDs can implement the master/slave function by using the CAN master/slave communication
card. The wiring diagram is as follows:
GD350-19 VFD
GD350-19 VFD
Master
Slave
CAN
master/slave
communication
card
CANH
CAN
master/slave
communication
card
CANH
CANL CANL
The specific CAN communication master/slave modes are: master/slave mode 0–2 are master/slave

 Loading...
Loading...

