805.73
K-Commander Loss-in-Weight Programming
Rev: G Produced by the K-Tron Institute
LWF Page 08: Frequency I/O, Continued
Frequency
ouput scaling
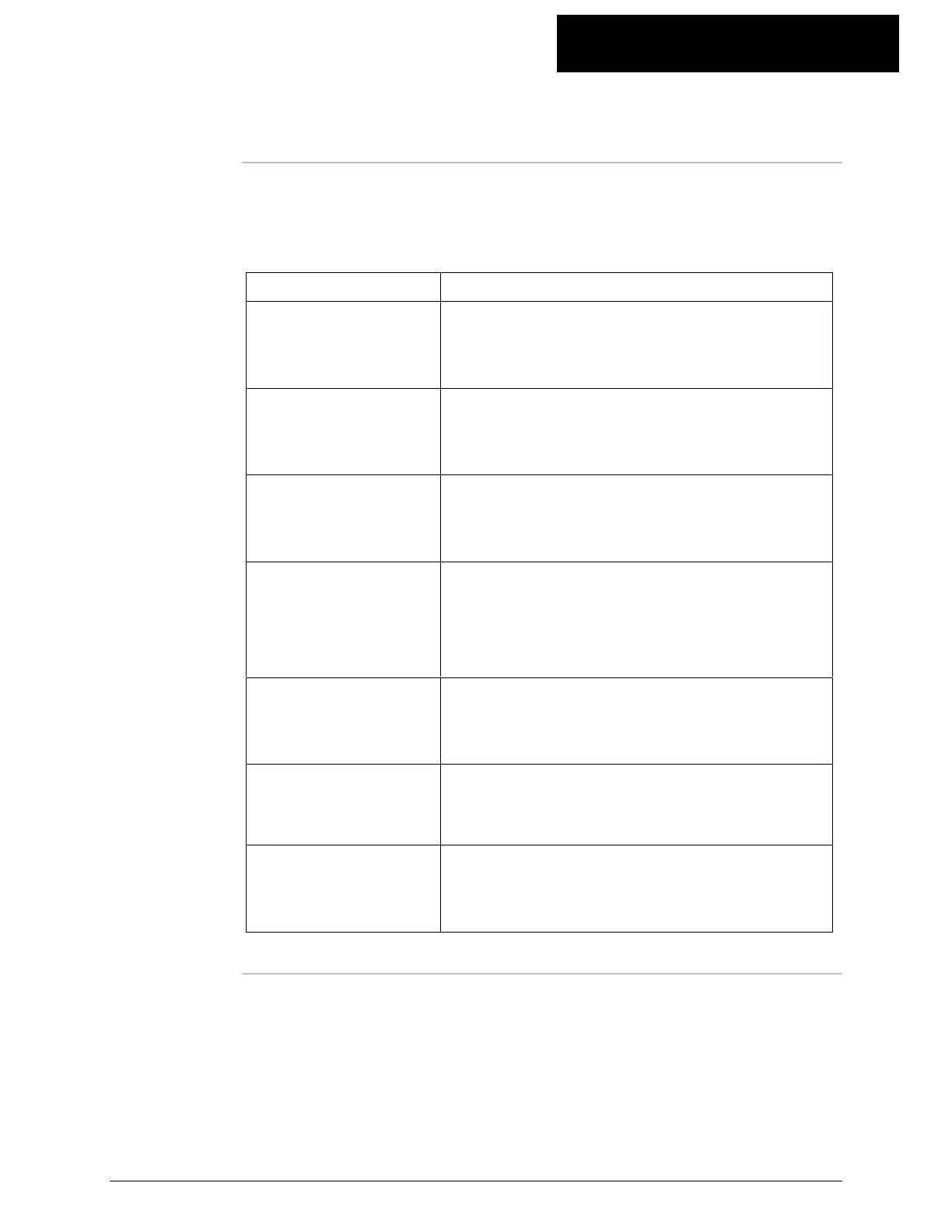
The following table indicates the equations for frequency outputs for
the LWF application. Note: FSS = Full Scale Setpoint from page 07.
Frequency Name Equation for Output
Massflow Fo = (Massflow/FSS) * 10kHz
ex: Fo= (5000Kg/Hr/10000Kg/Hr) *10kHz
Fo = 5000 Hz.
Setpoint Fo = (Operating Setpoint/FSS) * 10kHz
ex: Fo= (3000Kg/Hr/10000Kg/Hr) *10kHz
Fo = 3000 Hz.
Weight on Scale Fo =
(10kHz/Scale Range)*Actual Net Weight
ex: Fo= (10kHz/120kg)*43Kg = 3583 Hz
Deviation from
Setpoint
Fo = 5Khz + 10kHz*(Massflow Error/FSS)
ex: Massflow error = -50 Kg/Hr:
Fo = 5 kHz + 10kHz(-50/10000) = 4950Hz
Note sign of the massflow error.
Drive Command Fo =
10Khz* (Current Drive Command%)/100%
ex: 10kHz *( 43%/100%) = 4300 Hz.
Screw Speed
Fo = Motor speed frequency/(# of Gear
Teeth*Total Reduction)
ex: Fo = 3200/(120*1) = 26 Hz
Density Factor Fo =
(5Khz/Initial Feedfactor)* Ave. Feedfactor
ex: Fo = (5000/1000)*343 = 1715 Hz.