27
Accessories
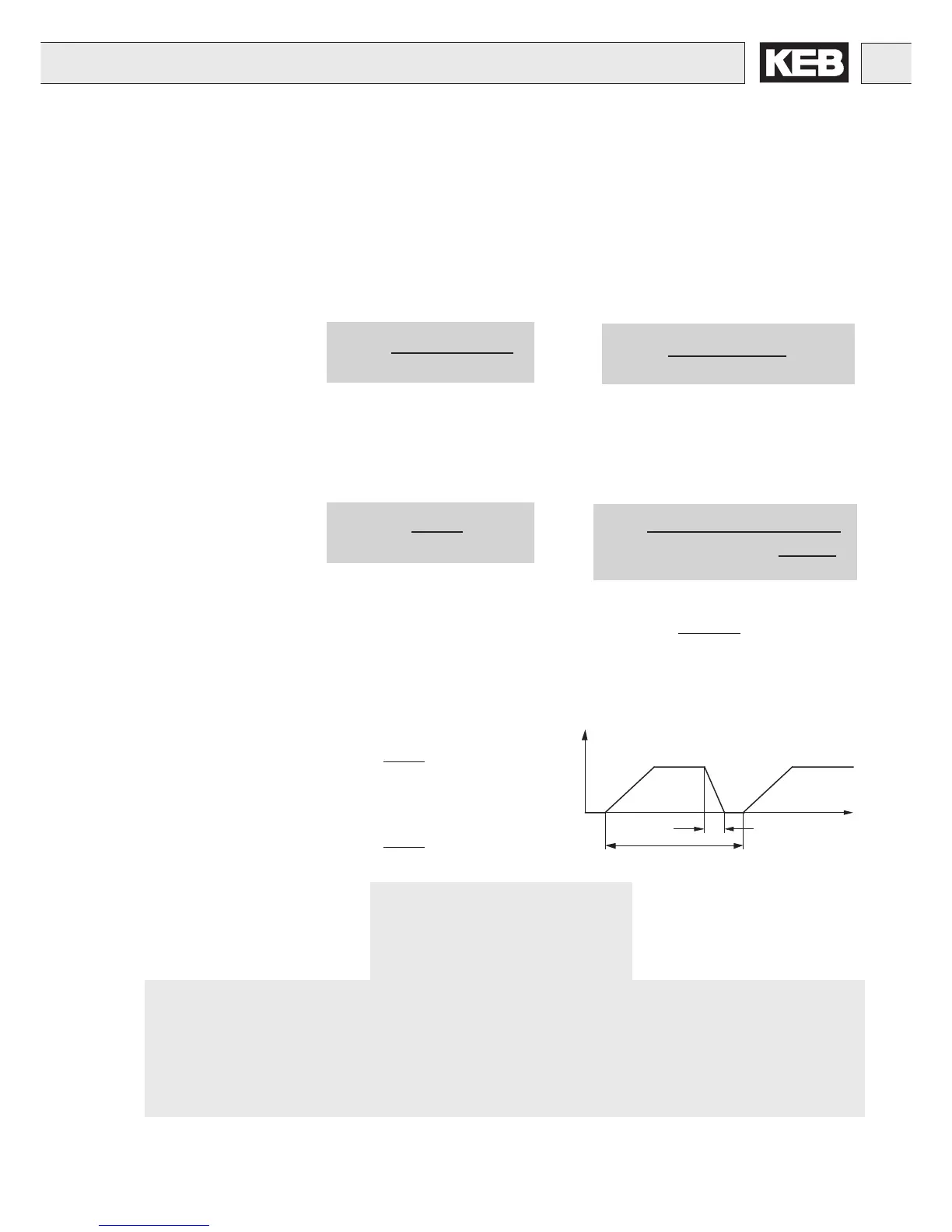
t
f
t
B
t
Z
J
M
= Moment of inertia of the motor [lb ft
2
]
J
L
= Moment of inertia of the load [lb ft
2
]
n
1
= Motor speed before deceleration [rpm]
n
2
= Motor speed after deceleration [rpm]
(Stand still = 0 rpm)
n
N
= Motor rated speed [rpm]
T
N
= Motor rated torque [ft lbs]
On period d.c.f.
t
B
d.c.f = • 100 %
120 s
ON period d.c.f for cycle
time t
Z
> 120 s
t
B
d.c.f = • 100 %
t
Z
ON period d.c.f for cycle
time t
Z
< 120 s
Braking time
( )
(J
M
+ J
L
) • (n
1
- n
2
)
t
Bmin
=
307 • (K • T
N
+ T
L
)
4. Braking time with braking resistor
Valid range: n
1
> n
N
(field weakening)
Conditions: T
B
- 1.5 • T
N
f < 1.4 x rated frequency of motor
Conditions: P
B
< P
R
Valid range: n
1
> n
N
P
R
• 9.55
Conditions: - T
N
• (1.5 -K)
(n
1
- n
2
)
f < 1.4 x rated frequency of motor
P
B
< P
R
(J
M
+ J
L
) • (n
1
- n
2
)
T
B
= - T
L
307 • t
B
T
B
• n
1
P
B
=
7.04
3. Peak braking power
(J
M
+ J
L
) • (n
1
- n
2
)
t
Bmin
=
P
R
• 7.04
307 • K• T
N
+ T
L
+
(n
1
- n
2
)
1. Braking time without braking resistor
2. Braking torque (required)
Formulas
Definitions
T
B
= Braking torque (required) [ft lbs]
T
L
= Load torque [ft lbs]
t
B
= Braking time (required) [s]
t
Bmin
= Minimum braking time [s]
t
Z
= Cycle time [s]
P
B
= Peak braking power [W]
P
R
= Peak power dissipation of the resistor [W]
The braking time is adjusted in the frequency inverter through the
deceleration parameters. If the selected deceleration time is too short,
either the peak inverter current level or the maximum DC bus voltage will
be exceeded. The error message E.OC or E.OP will result. The following
formulas can be used to determine an allowable braking time.
K = 0.25 for motors up to 2 hp
0.20 for motors 3 to 5 hp
0.15 for motors 7.5 to15 hp
0.08 for motors 20 to 60 hp
0.05 for motors 75 to 400 hp
 Loading...
Loading...














