OI PT 1300 D English / Edition 3.0 / 23.10.2009
11.2 REGISTER MAPPING
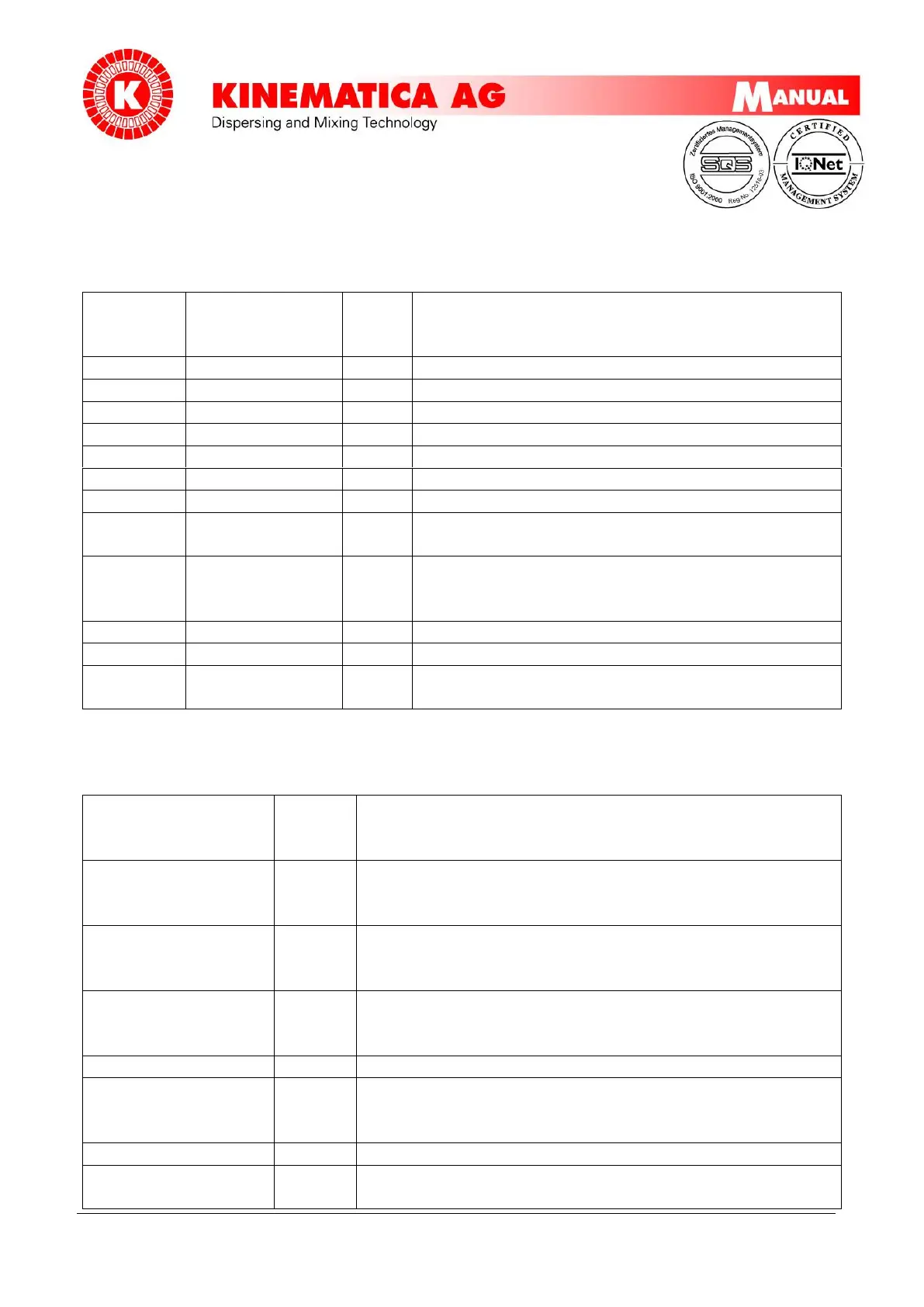
The following mapping is integrated.
Only value 1 allowed, Motor on
Set rotation speed, range 10..300 [100rpm]
Only value 0 allowed, Motor off
Actual speed, range 10..300 [100rpm]
Internal temperature [0.1°C]
Motor current [mA], average
Input power [0.1 W]
Current average x measured voltage
Torque [0.1 mNm]
Based on the current value and the torque
constant of 7.48mNm / A
Output power [0.1 W], torque x actual speed
Firmware-Version 10000..32767
effective: 10100
11.3 DEVICE STATUS
For the Register Address 6 (DevState) to apply the following Bit-Definition:
Motor blocked,
to reset the fault the unit must be set OFF. The unit must
be restarted.
Unit to hot (limit 70.0°C),
to reset the fault the unit must be set OFF. The unit must
be restarted.
Hallsensor fault
to reset the fault the unit must be set OFF. The unit must
be restarted.
Supply voltage out of limit of 22.0 .. 27.5V,
to reset the fault the unit must be set OFF. The unit must
be restarted.
Unit is controlled via interface, keypad is inactive
To reset, the unit must be set OFF. The unit must be
restarted.
Temporary overload, Motor has no set speed while the
load is to high (margin: -500rpm)