1 Supplementary Operating Manual
19 of 48
AmaControl
2301.83/04-EN
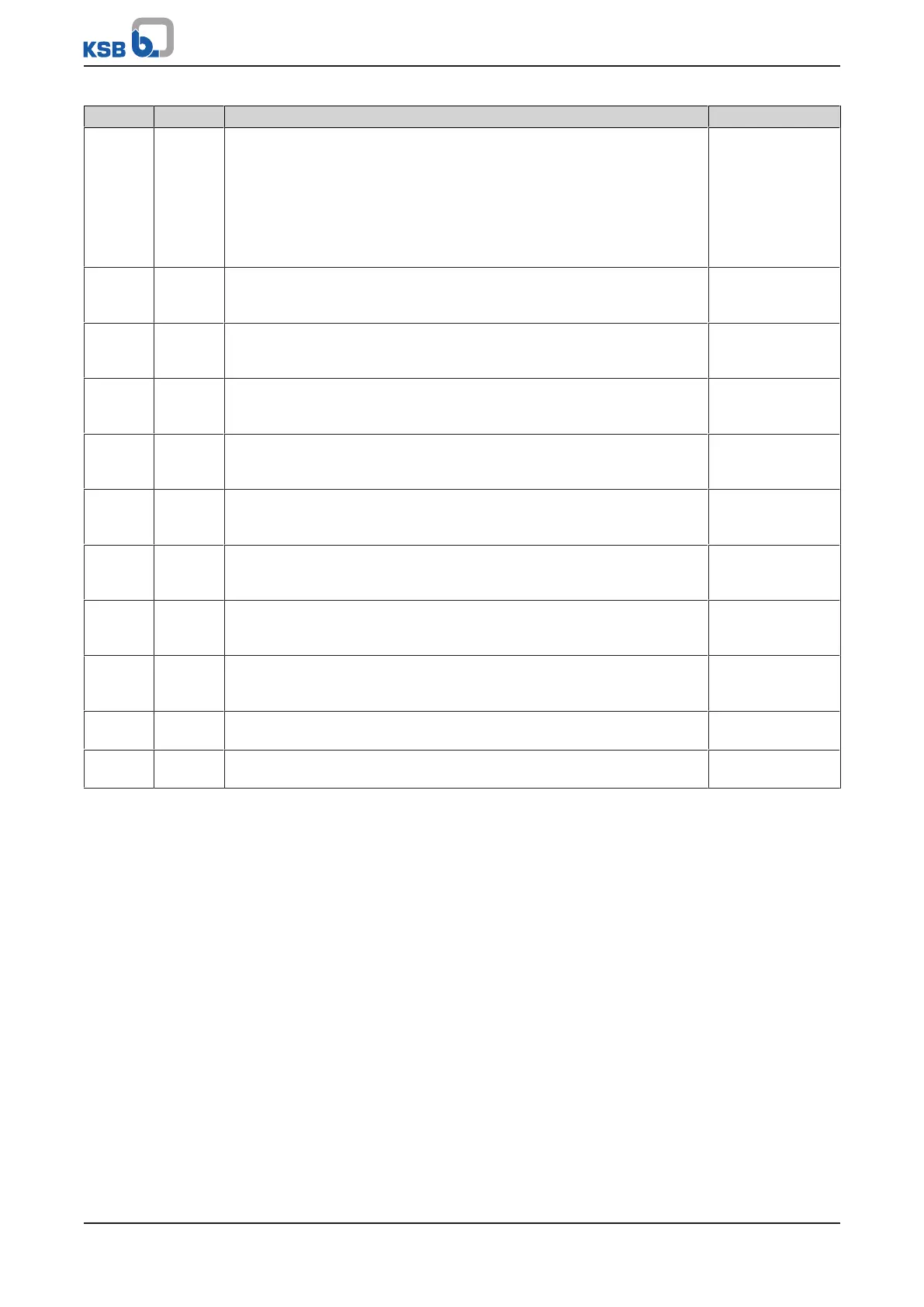
Start End Description Data type
8603 8603 Module condition, phase overvoltage
High byte: error number
Low byte: module condition, bit-coded
Bit 0 = active
Bit 1 = warning
Bit 2 = fault
Bit 3 = re-start delay
Bit 4 = interlocked
u 16bit
8604 8604 Current loop
Minimum value for conversion
0…65535
u 16bit
8605 8605 Current loop
Maximum value for conversion
1…655 535
u 16bit
8606 8606 Current loop
High byte: unit 1st character
High byte: unit 2nd character
u 16bit
8607 8607 Current loop
High byte: unit 3rd character
High byte: unit 4th character
u 16bit
8608 8608 Temperature sensor, sensor setting
High byte: temperature sensor 2, sensor type
Low byte: temperature sensor 1, sensor type
u 16bit
8609 8609 Leakage sensor: sensor setting
High byte: leakage sensor 2, sensor type
Low byte: leakage sensor 1, sensor type
u 16bit
8612 8612 Time until servicing is required
65 535 = interval expired
0…65,534
u 16bit
8613 8613 Service interval status
0 = inactive
> 0 = active
u 16bit
8620 8620 Current loop, limit of sensor detection
0…65535
u 16bit
8621 8621 Motor sensor, sensor setting
Low byte: sensor type
u 16bit

 Loading...
Loading...