CS2RS Series Modbus RS485 Closed Loop Stepper Drive User Manual
The position & velocity& homing and so on are achieved through one data frame. This method uses PR0 to implement, which
has 8 data, the last parameter Pr9.07 is mapped to Pr8.02, writing value 0x10 to it will trigger PR0 motion immediately, thus
realizing the immediate trigger operation.
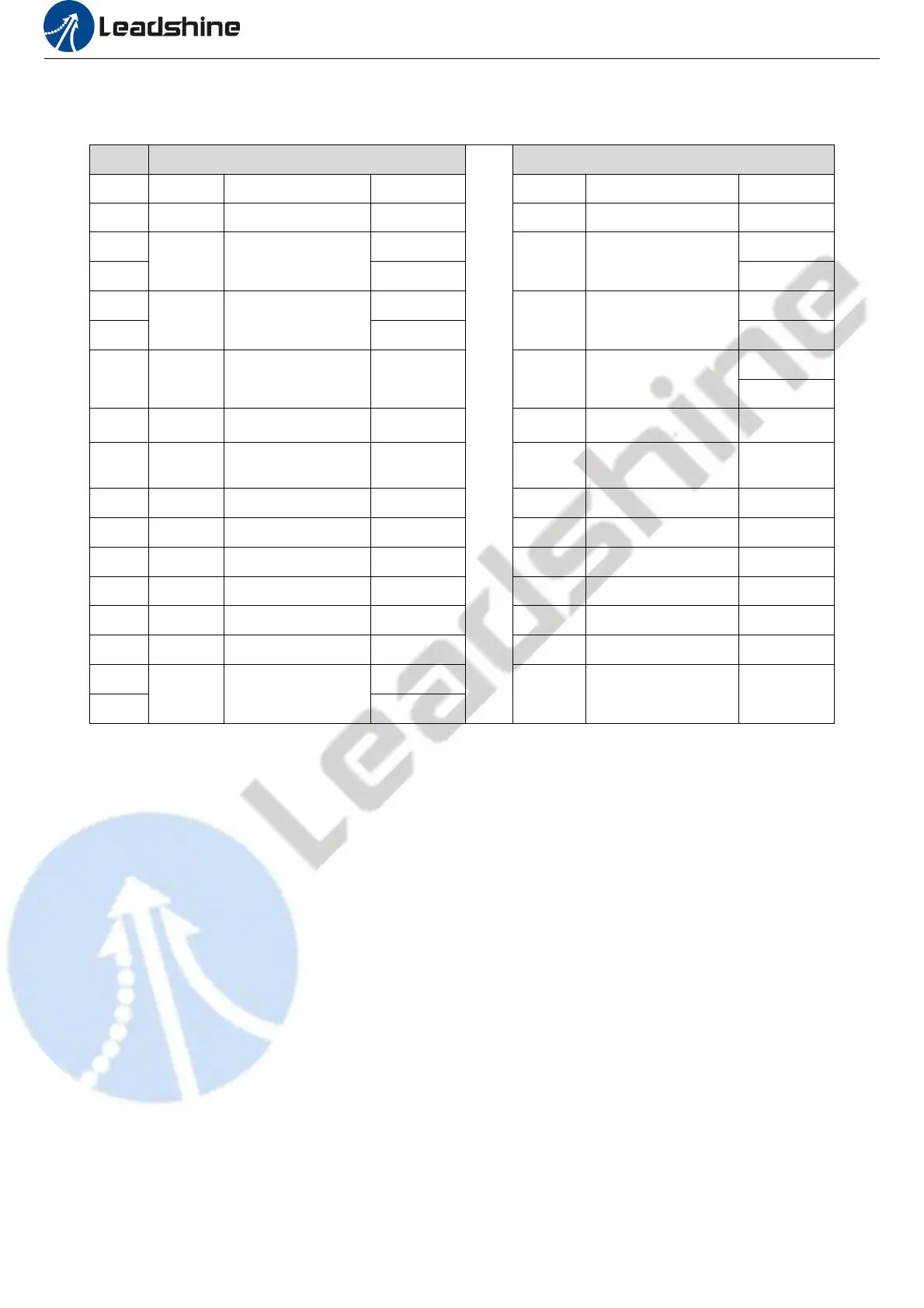
Sending message (Master->Slave)
Return message (Slave->Master)
Actually written
Number of
For example:
PR0: velocity 200 rpm, distance 10000 p
Master sending: 07 10 62 00 00 08 10 00 01 00 00 27 10 00 00 27 10 27 10 00 00 00 10 8D 50
Drive return: 07 10 62 00 00 08 DE 11