Preface and general information
System block introduction
Access via absolute addresses
1
24
EDBCSXA064 EN 3.2
1.5.4 Access via absolute addresses
You can also access the inputs and outputs of the system blocks via absolute addresses
according to standard IEC 61131−3:
For inputs: For outputs:
%IXa.b.c %QXa.b.c
a = node number
b = word address
c = bit address
In this Manual, the absolute addresses can be retrieved in the system variable table of the
corresponding system block.
Example: Table with the inputs of the SB Inputs_Digital of the ECSxA... axis module
Variable Data
type
Signal
type
Address Display
code
Display
format
Notes
DIGIN_bCInh_b
BOOL binary
%IX1.0.0 ˘ ˘
Controller inhibit ˘ takes
direct effect on the
device control DCTRL.
DIGIN_bIn1_b %IX1.0.1
C0443 bin
DIGIN_bIn2_b %IX1.0.2
DIGIN_bIn3_b %IX1.0.3
DIGIN_bIn4_b %IX1.0.4
DIGIN_b_safe_standstill_b %IX1.0.5
"Safe torque off"
(former "safe standstill")
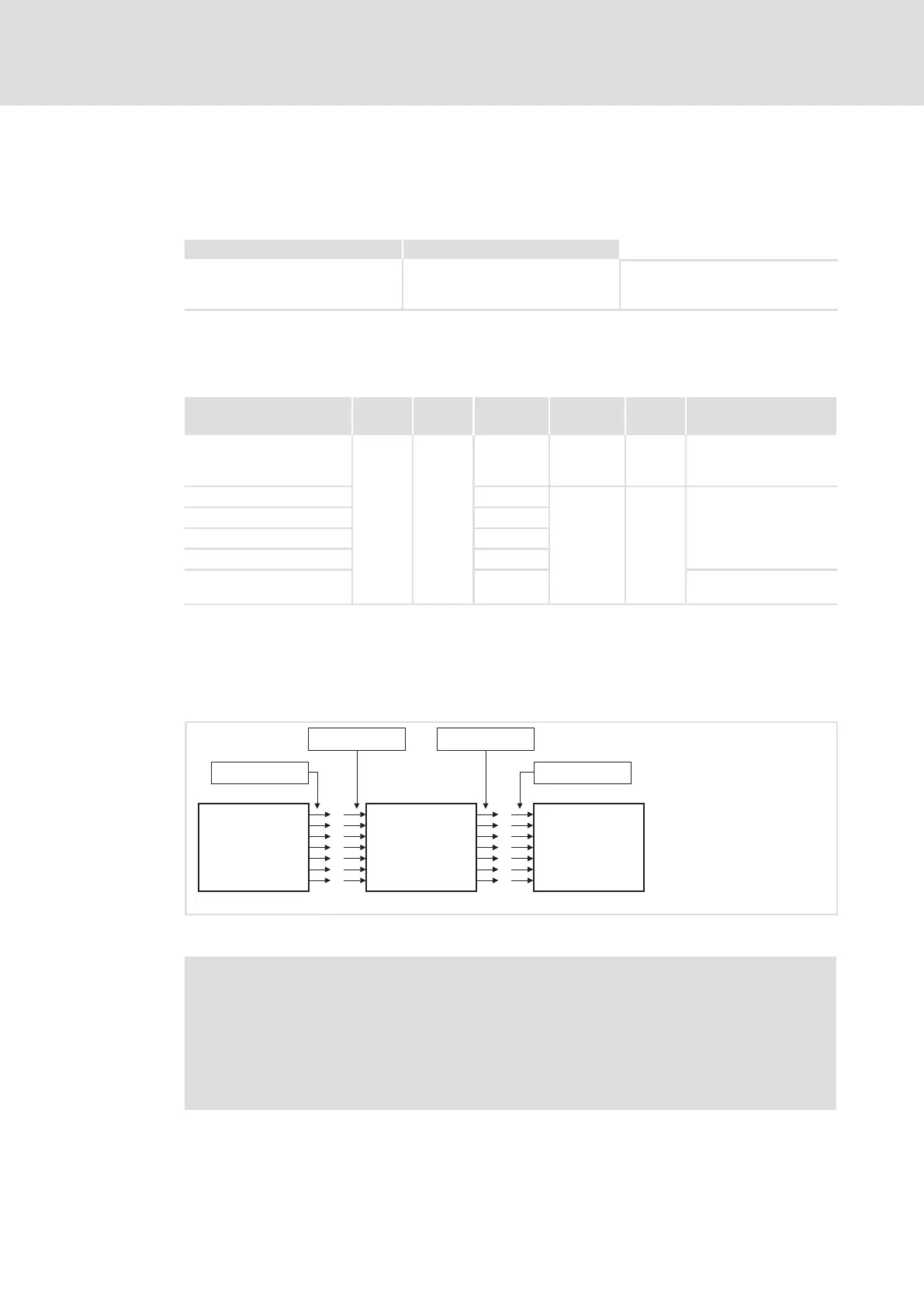
1.5.5 Definition of the inputs/outputs
For connecting the application program with the hardware, system blocks are connected
with program organisation units (POU):
SB
SB-Output
POE-Input POE-Output
SB-Input
SBPOE
Fig. 1−1 Plan: Connecting system blocks to a program organisation unit (POU)
Note!
Inputs and outputs are always classified from the program’s point of view.
ƒ Logical SB inputs are always hardware−side outputs of the ECSxA axis...
module
ƒ Logical SB outputs are always hardware−side inputs of the ECSxA axis...
module