System modules
CAN2_IO (node number 32)
Outputs_CAN2
13
293
EDBCSXA064 EN 3.2
13.9.2 Outputs_CAN2
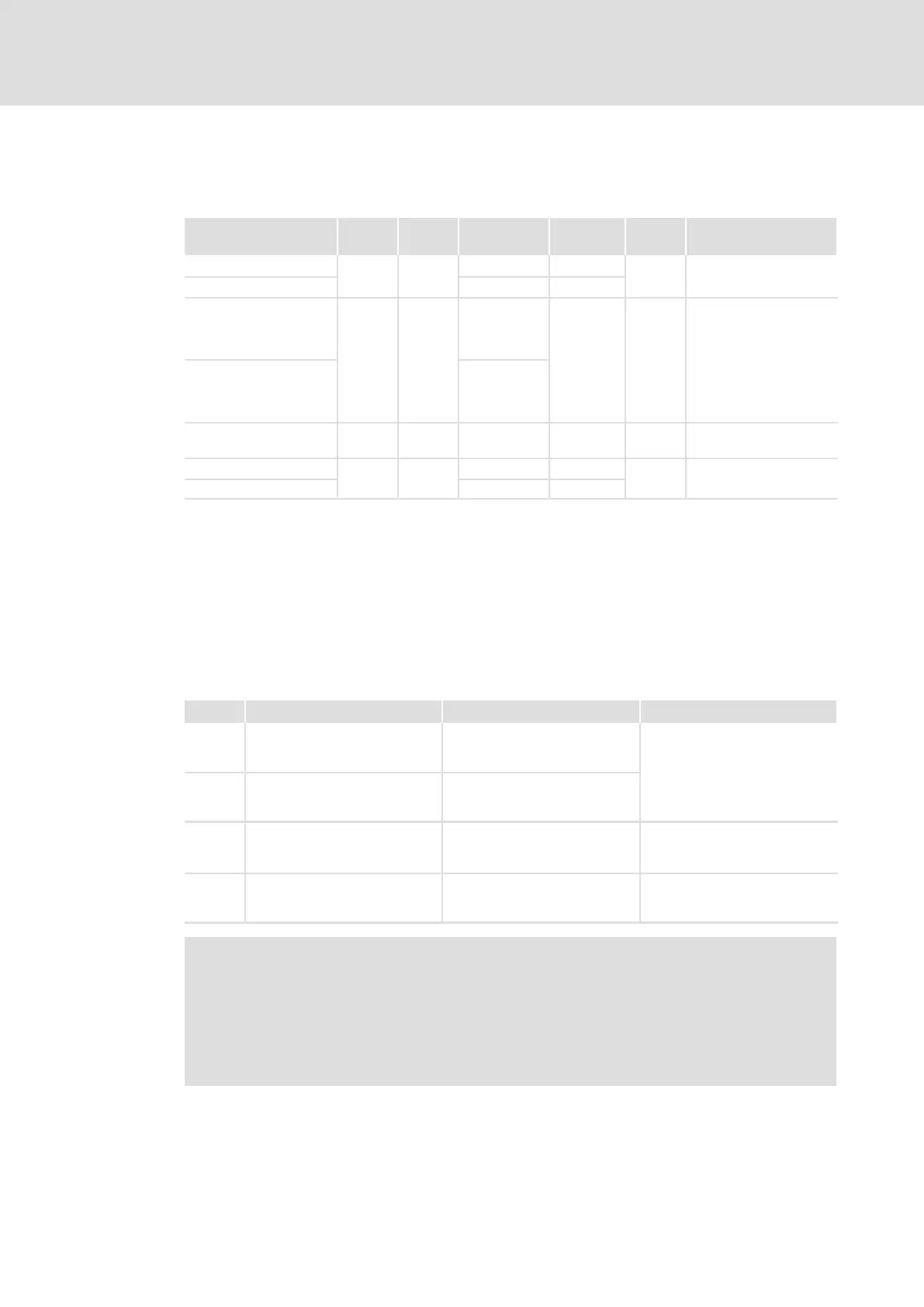
System variables
Variable Data
type
Signal
type
Address Display
code
Display
format
Comments
CAN2_nOutW1_a
integer
analog
%QW32.0 C0868/4
dec [%]
CAN2_nOutW2_a %QW32.1 C0868/5
CAN2_bFDO0_b
BOOL binary
%QX32.0.0
C0151/2 hex
Display code in hex
as double word
... ...
CAN2_bFDO15_b %QX32.0.15
CAN2_bFDO16_b %QX32.1.0
... ...
CAN2_bFDO31_b %QX32.1.15
CAN2_dnOutD1_p double
integer
position %QD32.0 C0869/2 dec [inc]
CAN2_nOutW3_a
integer analog
%QW32.2 C0868/6
dec [%]
CAN2_nOutW4_a %QW32.3 C0868/7
User data
The first 4 bytes of the 8 bytes user data to be sent can be written via several variables of
different data types. According to requirements, data can therefore be transferred from
the PLC program as
ƒ binary information (1 bit)
ƒ status word/quasi−analog value (16 bit)
ƒ angle information (32 bit)
Byte Variable (1 bit) Variable (16 bit) Variable (32 bit)
1, 2 CAN2_bFDO0_b
...
CAN2_bFDO15_b
CAN2_nOutW1_a
CAN2_dnOutD1_p
3, 4 CAN2_bFDO16_b
...
CAN2_bFDO31_b
CAN2_nOutW2_a
5, 6
CAN2_nOutW3_a
7, 8
CAN2_nOutW4_a
Note!
Avoid simultaneous overwriting via different variable types to ensure data
consistency.
If you want to describe e.g. the bytes 1 and 2, either use only the variable
CAN2_dnOutD1_p, only the variable CAN2_nOutW1_a or only the variables
CAN2_bFDO0_b ... CAN2_bFDO15_b!