Commissioning
Selecting the operating mode/control structure
Speed control with setpoint via MotionBus (CAN)
6
132
EDBCSXS064 EN 4.0
6.10.3 Speed control with setpoint via MotionBus (CAN)
Configuration C3005 = 1005
Note!
ƒ Use the "input assistant for motor data" of the GDC for setting the motor
data ( 100).
ƒ Reading the data via CAN1_In requires an external sync signal (from the
master control).
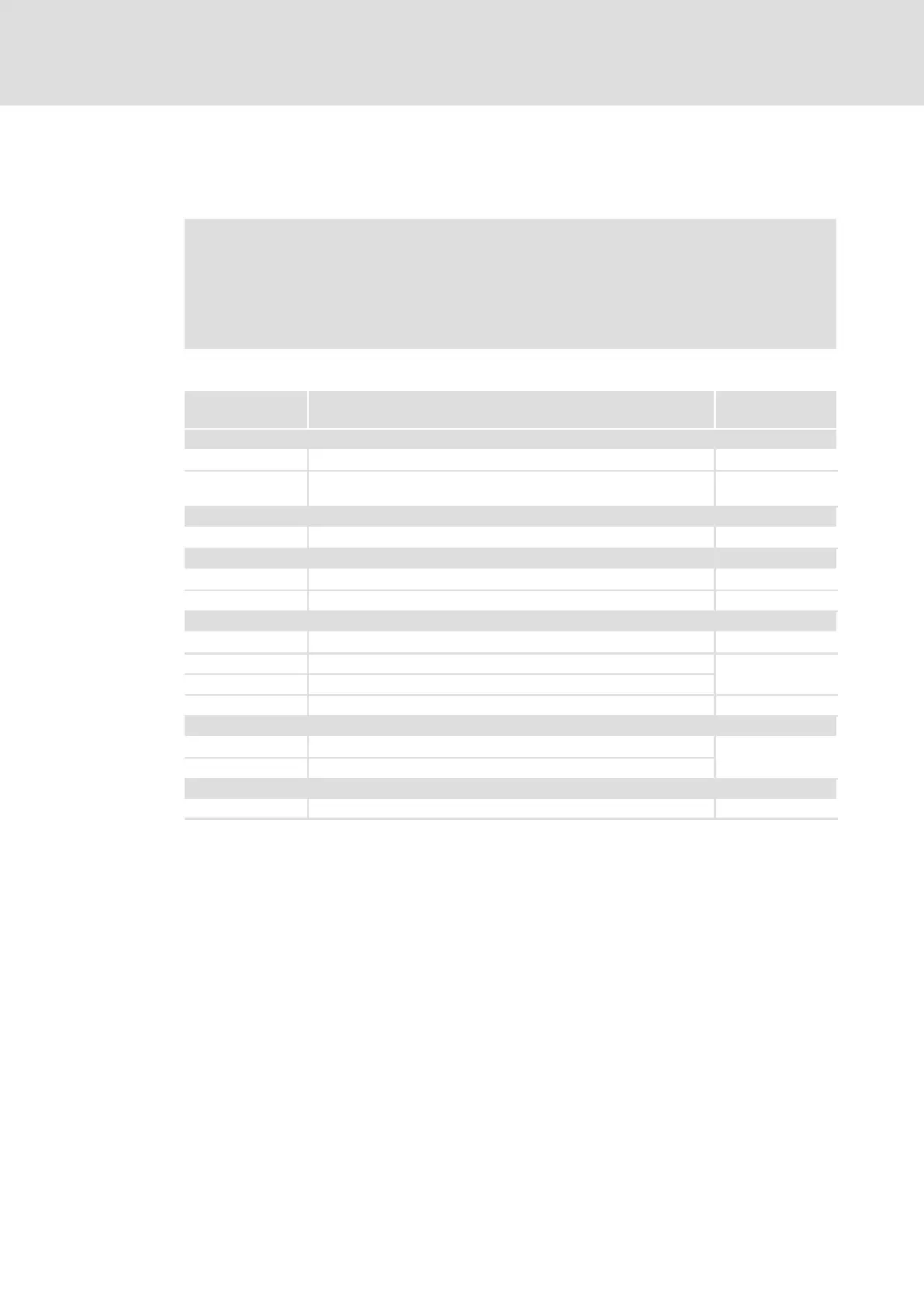
Set the following codes:
Code Meaning Further
information
DC−bus voltage thresholds and charge relay function
C0173 = x DC−bus voltage thresholds 99
C0175 = x Charge relay function
(when using an ECS supply module: C0175 = 3)
98
Maximum motor current
C0022 = x [A] Maximum motor current (I
max
)
Controller configuration and feedback system
C3005 = 1005 Speed control with setpoint via MotionBus (CAN) 126
C0495 = x Feedback system 103
Speed setpoint settings
C0011 = x [rpm] Maximum speed 333
C0012 = x [s] Acceleration time
327
C0013 = x [s] Deceleration time
C0105 = x [s] Quick stop deceleration time 338
Application parameters
C0070 = x Proportional gain (V
p
) of speed controller
333
C0071 = x [ms] Integral−action time (T
n
) of speed controller
Save parameters
C0003 = 1 Save all parameters
 Loading...
Loading...