16 Lenze 13466187 EDBTL03 v8 EN, DE, FR, IT, ES
Commissioning
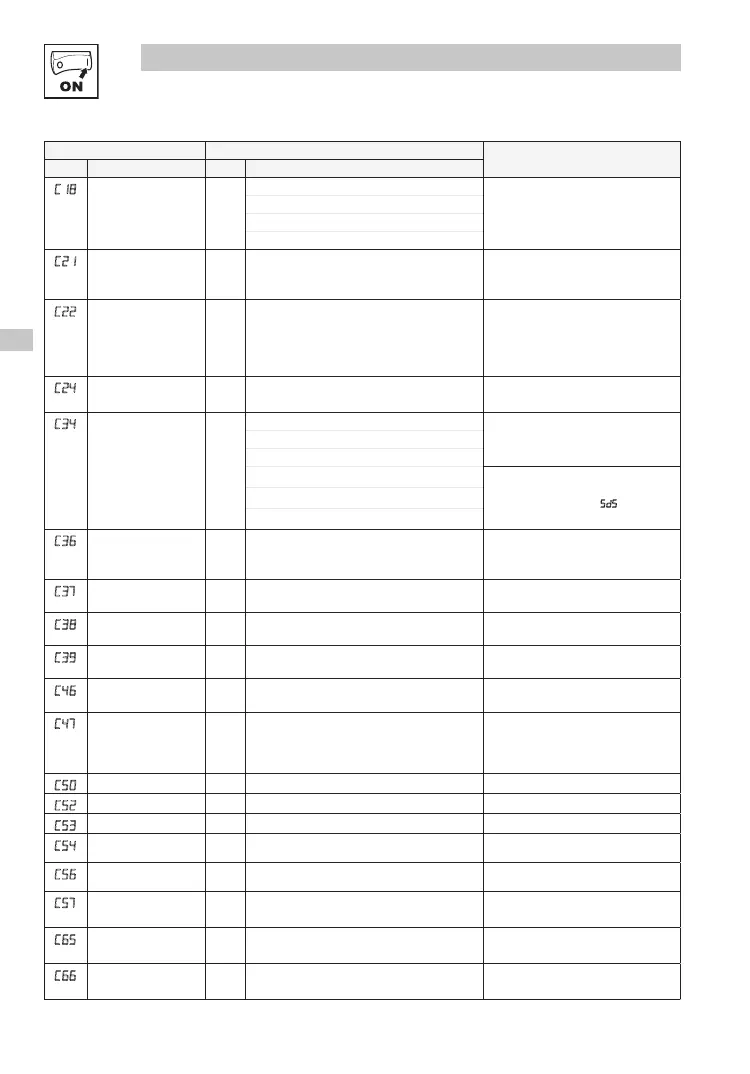
Code Possible Settings
IMPORTANT
No. Name Lenze Selection
C18
Chopper frequency
2
0 4 kHz • As chopper frequency is increased,
motor noise is decreased
• Observe derating in Section 2.2
• C18 = 1, 2, 3: Automatic derating to
4 kHz at 1.2 x I
N
1 6 kHz
2 8 kHz
3 10 kHz
C21
Slip compensation
0.0
0.0 {%} 40.0
C21 not active in Vector mode (see C14)
Change C21 until the motor speed no
longer changes between no load and
maximum load
C22
Current limit
200
30 {%} 200
Reference: Tml rated output current
• When the limit value is reached,
either the acceleration time
increases or the output frequency
decreases
• When c73 = 0, max setting is 167%
C24
Accel boost
0.0
0.0 {%} 20.0
Accel boost is only active during
acceleration
C34
Conguration-
analog input
0
0 0...10 V
1 0...5 V
2 Reserved
3 0...20 mA • With 250 Ω resistance between
terminals 7 and 8
• C34 = 5 will trigger 5d5 fault if
signal falls below 2 mA
4 4...20 mA
5 4...20 mA monitored
C36
Voltage - DC injection
brake (DCB)
4.0
0.0 {%} 50.0 • See CE1...CE3 and c06
• Conrmmotorsuitabilityforuse
with DC braking
C37
Fixed setpoint 1
(JOG 1)
20.0
0.0 {Hz} 240 Lenze setting: active at E1 = HIGH
C38
Fixed setpoint 2
(JOG 2)
30.0
0.0 {Hz} 240 Lenze setting: active at E2 = HIGH
C39
Fixed setpoint 3
(JOG 3)
40.0
0.0 {Hz} 240 Lenze setting: active at E1 = HIGH
and E2 = HIGH
C46
Frequency setpoint 0.0 {Hz} 240 Display: Setpoint via analog input,
function UP/DOWN
C47
Torque setpoint/range
100
0 {%} 400 • When C14 = 5 and C01 = 1, 3, 5, 7
sets the torque setpoint
• When C14 = 5 and C01 = 0, 2, 4, 6
sets the torque range for C34
C50
Output frequency 0.0 {Hz} 240 Display
C52
Motor voltage 0 {V} 999 Display
C53
DC bus voltage 0 {V} 999 Display
C54
Motor current 0.0 {A} 400 Display
C56
Controller load 0 {%} 255 Display
C57
Motor torque 0 {%} 400 Display: vector mode only
(C14 = 4, 5)
C65
Vector speed control
loop gain
30.0
0.0 100 Optimizes dynamic performance in
vector mode
C66
Vector speed stability
30.0
0.0 100 Optimizes steady-state speed stability
in vector mode
 Loading...
Loading...