58
PID Differential Feedback Source
Set E3-01 to 10 (differential feedback)
Set E3-07 to 10 (differential feedback)
Note: When more than one PID feedback differential input source is assigned, oPE09 fault will be triggered.
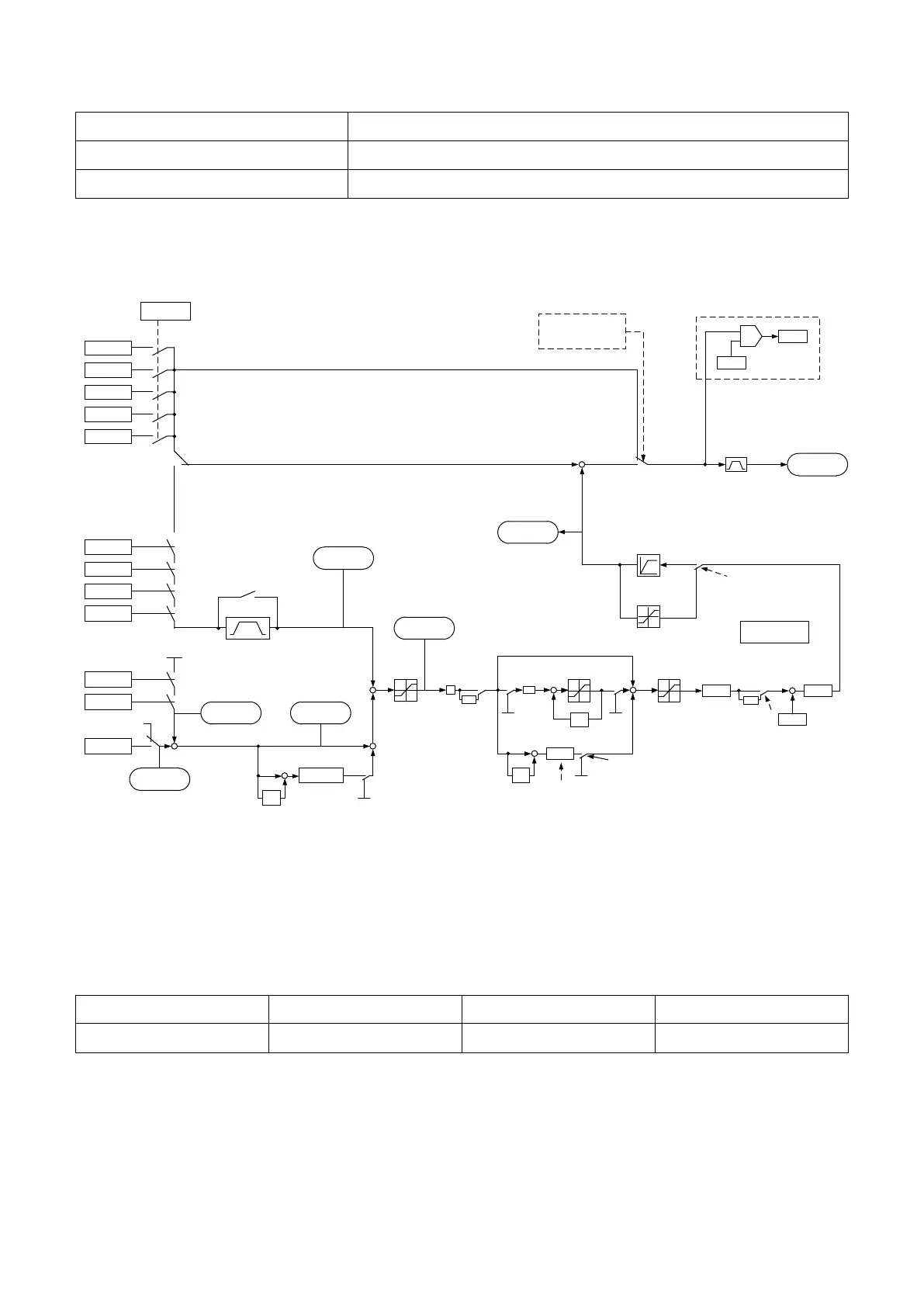
■ PID Block Diagram
頻率指令1~16
端子 A1 / A2
端子Up/Down
Modbus通訊
Modbus暫存器
脈波序列輸入
PID目標值
( b5-18 )
脈波序列輸入
端子 A1 / A2
脈波序列輸入
端子 A1 / A2
端子 A1 / A2
PID目標值
( U4-03 )
PID差動回授
( U4-04 )
PID回授量
( U4-00 )
PID回授量2
( U4-05 )
D
P
-1
PID輸入
( U4-02 )
I
Z
-1
D
b5-07
-1
b5-09
b5-06
PID輸出
( U4-02 )
輸出頻率
B5-14
B5-15
頻率指令選擇
( b1-00 / b1-07 )
0
1
2
3
4
頻率指令
PID目標值
PID回授值
b5-00 = 3 or 4
PID控制的選擇
b5-00 = 1 or 2
1 0
not 1
not 2
not 3
b5-17 = 1
E5-00 = 2
E3-01/07 = 9
0
not 1
not 8
E5-00 = 1
E3-01/07 = 8
E3-01/07 = 10
0
not 10
- +
Z
-1
+
-
微分時間 ( D )
( b5-04 )
2 or 4
1 or 3
+
+
+
-
PID控制的選擇
( b5-00 )
PID加減速時間
( b5-16 )
ON
OFF
PID緩衝啟動開關
( E1-_ _ = 50 )
PID無效:
1. b5-00 = 0
2. 吋動指令輸出
3. 數字輸入有效,則PID無效
+
+
PID無效
PID有效
+
-
暫停功能
暫停功能啟動的門檻值
暫停功能的延遲時間
運轉指令ON/OFF
SFS
C1-_ _
PID輸入限制量
( b5-21 )
比例增益 ( P )
( b5-01 )
0
1
PID輸出的特性選擇
( E1-_ _= 50 )
or
( b5-08 )
0
1
0
1
+
+
Z
-1
+
+
+
1 or 3
2 or 4
0
1
+
+
0
1
積分時間 ( I )
( b5-02 )
PID積分保持
( E1-_ _= 48 )
積分時間 ( I ) 的上限值
( b5-03 )
PID積分復歸
( E1-_ _= 47 )
PID微分時間 ( D )
( b5-04 )
+
-
PID控制的選擇
( b5-00 )
PID輸出上限/下限值
( b5-05/b5-20 )
PID的一次延遲時間參數
PID輸出的特性選擇
( b5-08 )
PID偏壓調整
PID輸出增益
當b5-00 = 3 或 4 時,
b5-10始終為1
PID輸出為負時,
反轉運動可選"有效”或"無效”
下限值0
下限值
最高輸出頻率x109%
上限值
最高輸出頻率x109%
上限值
最高輸出頻率x109%
Figure 6.16 PID Block Diagram
b5- 00 PID Control Setting
Enables or disables the PID function and selects the PID mode.
0 : PID Control Disabled
1 : Output Frequency = PID Output 1