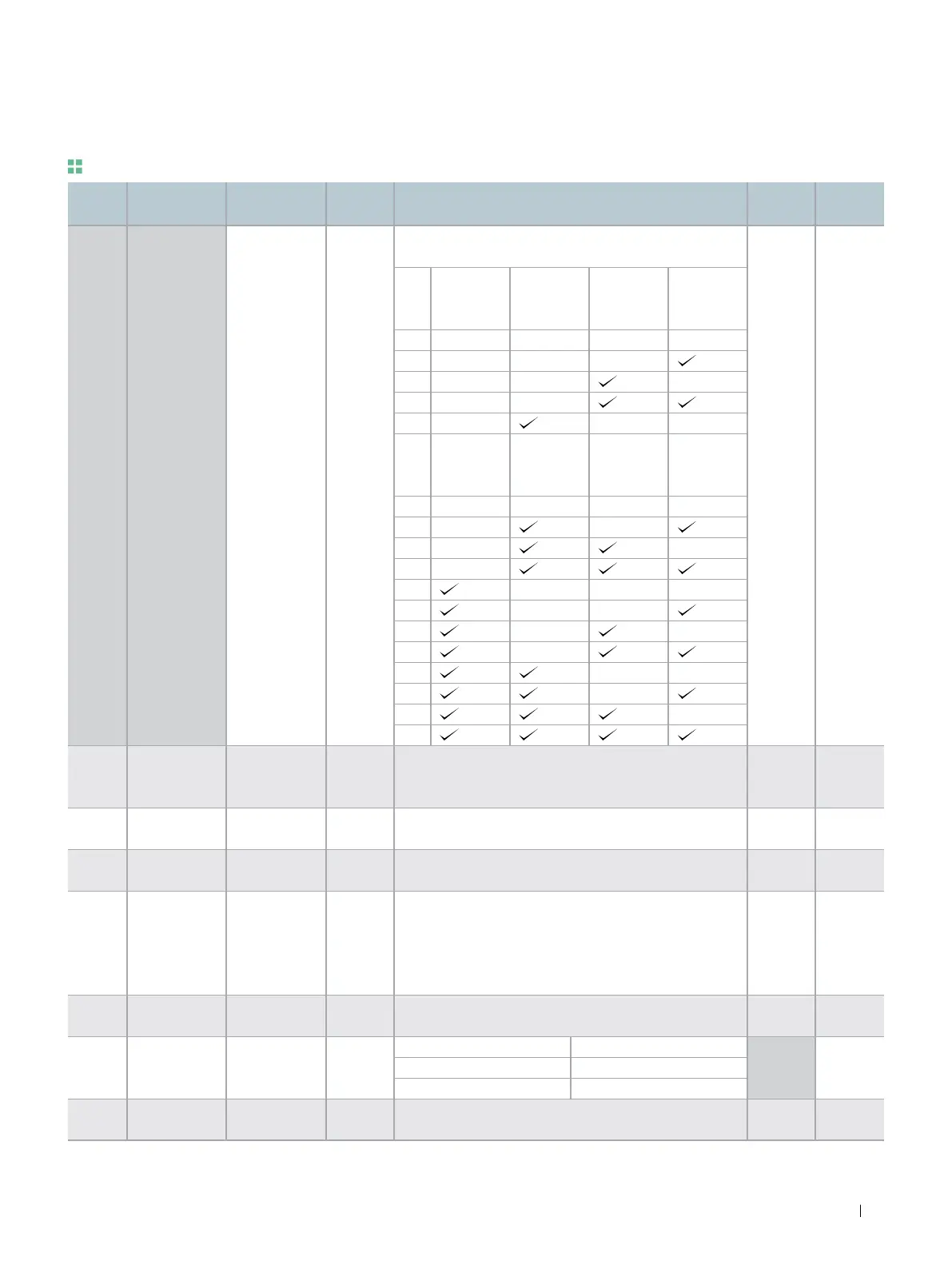
1) Normal acceleration has first priority. Even though #4 is selected along with other bits, Drive performs Speed search #4.
2) H30 is preset based on drive rating.
1)
2)
LED
display
Address for
communication
Parameter
name
Min/Max
range
Description
Adj.
during run
Factory
defaults
Function group 2
This parameter is active to prevent any possible fault when the
drive outputs its voltage to the running motor.
This parameter limits the amount of current during speed search.
The set value is the percentage of the H33- [Motor rated current].
It is the Proportional gain used for Speed Search PI controller.
It is the Integral gain used for Speed search PI controller.
This parameter sets the number of restart tries after a fault
occurs. Auto Restart is deactivated if the fault outnumbers the
restart tries. This function is active when [drv] is set to 1 or 2
{Run/Stop via control terminal}. Deactivated during active
protection function (OHT, LVT, EXT, HWT etc.).
This parameter sets the time between restart tries.
This setting is displayed via rPM in drive group.
0 O
100 O
100 O
200 O
0 O
1.0 O
7.5 X
4 X
H22
H23
H24
H25
H26
H27
H30
H31
A316
[Speed Search
0 ~ 15
Select]
[Current level
80~200
A317 during Speed
[%]
search]
A318
[P gain during
0~9999
Speed search]
A319
[I gain during
0~9999
speed search]
A31A
[Number of Auto
0 ~10
Restart try]
A31B
[Auto Restart 0~60
time] [sec]
[Motor type
A31E
select]
0.2~ 22.0
A31F
[Number of
2 ~ 12
motor poles]
1. H20- 2. Restart 3. Operation 4. Normal
[Power
after instant
after fault accel
On start]
power failure
0 - - - -
1 - - -
2 - - -
3 - -
4 - - -
1. H20- 2. Restart 3. Operation 4. Normal
[Power
after instant
after fault accel
On start]
power failure
Bit 3 Bit 2 Bit 1 Bit 0
5 - -
6 - -
7 -
8 - - -
9 - -
10 - -
11 -
12 - -
13 -
14 -
15
0.2 0.2kW
~ ~
22.0 22.0kW
31
Compact & Powerful Drive iG5A
Drive Starvert iG5A Series

 Loading...
Loading...
