61
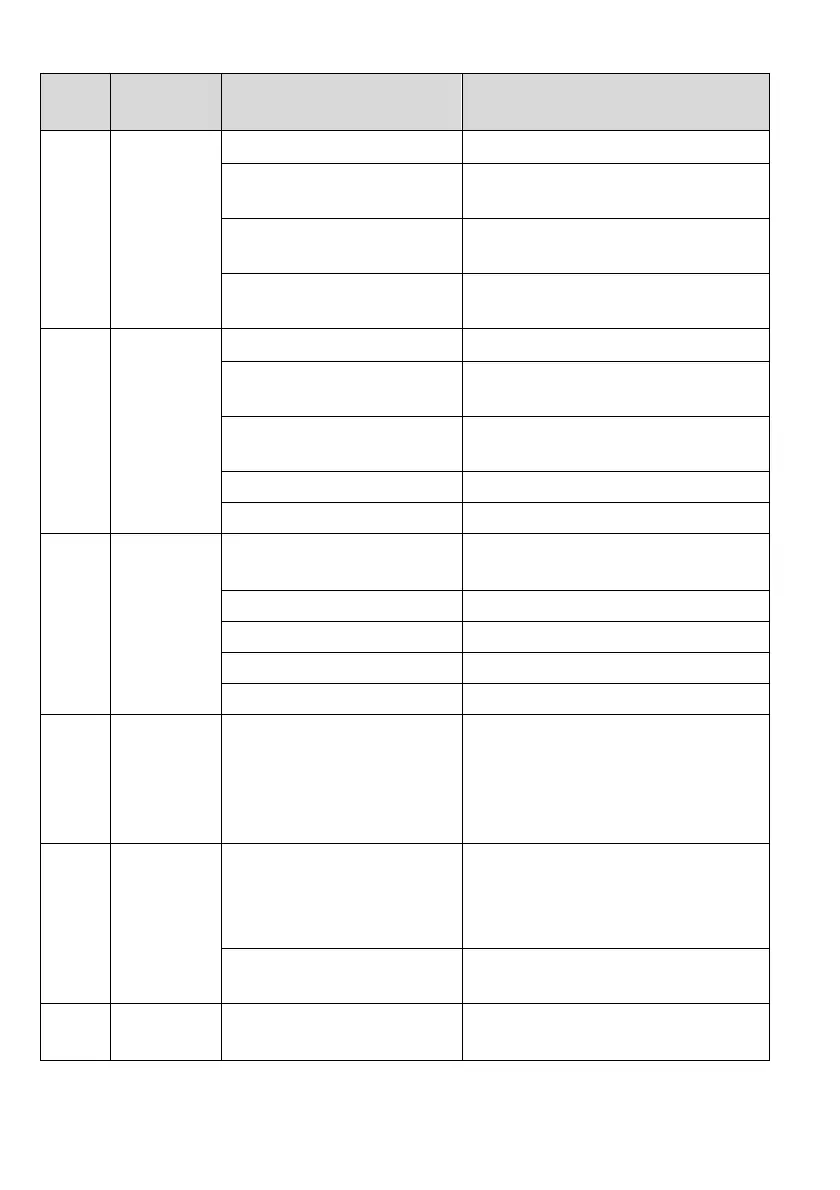
Fault
code
Fault type Possible fault cause Solutions
Er.SC1
Abnormal remote
serial port
communication
The baud rate is set improperly. Set the baud rate properly.
Serial port communication error
Reset by pressing the STOP/RESET key, seek for
service support
The fault alarm parameters are set
improperly.
Modify the P15.03 and P97.00 settings
The host device does not work.
Check if the host device is working and if the wiring
is correct.
Er.rLy
Abnormal
contactor
The grid voltage is too low. Check the grid voltage
The contactor is damaged.
Replace the contactor of the main circuit, seek for
service support
The power-up buffer resistance is
damaged.
Replace the buffer resistance, seek for service
support
The control circuit is damaged. Seek for service support
Input phase loss Check the input R.S.T. wiring
Er.CUr
Current detection
circuit abnormal
The wirings or the plug-in units of the
control board loosens.
Check them and rewiring
The auxiliary power supply is damaged. Seek for service support
The Hall device is damaged. Seek for service support
The amplifying circuit is abnormal. Seek for service support
The AI analog input voltage is too high. Reduce the AI analog input voltage to less than 12V
Er. EGL
External
reference
command lost
During the frequency main reference or
the torque command selection analog
current reference, the analog reference
signal is disconnected or too low (less
than 2mA).
Check the wiring or adjust the input type of the
reference signal
Er.CoP
Operation panel
parameter
copying error
The operation panel parameters are
incomplete or the operation panel
version is inconsistent with main control
panel version.
Refresh the operation panel data and version, use
P00.06=1 for uploading the parameters first and
then use P00.06=2 or 3 for downloading.
The operation panel EEPROM is
damaged.
Seek for service support
Er.TUn Poor auto-tuning
The nameplate parameters of the motor
are incorrect.
Set the parameters properly according to the motor
nameplate

 Loading...
Loading...