6 - 8
MELSEC-Q
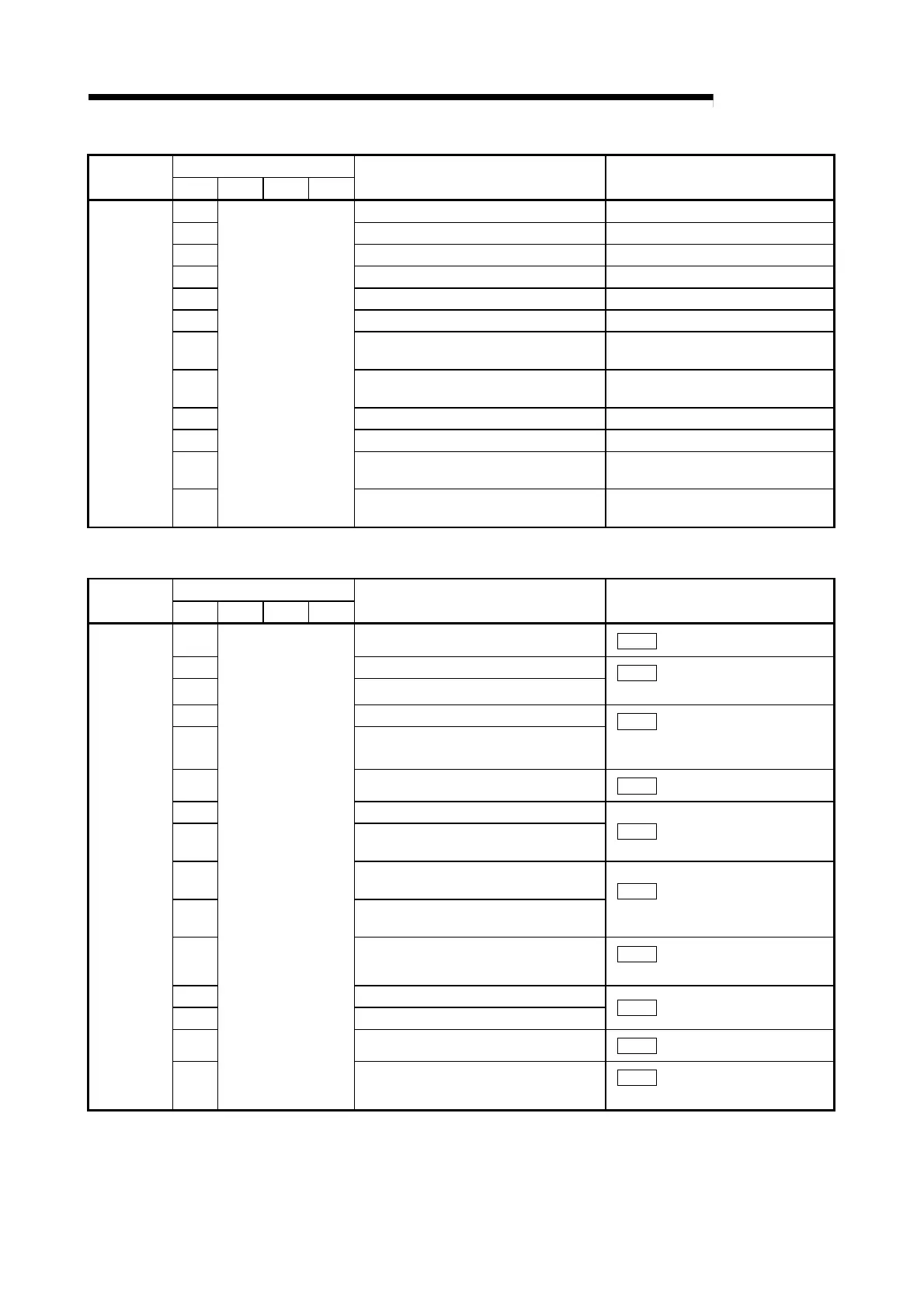
6 SEQUENCE PROGRAM USED FOR POSITIONING CONTROL
Device
Device
name
Axis 1 Axis 2 Axis 3 Axis 4
Application Details when ON
M34 ZP.TEACH1 instruction complete device ZP.TEACH1 instruction completed
M35 ZP.TEACH1 instruction failure device ZP.TEACH1 instruction failed
M36 ZP.PINIT instruction complete device ZP.PINIT instruction completed
M37 ZP.PINIT instruction failure device ZP.PINIT instruction failed
M38 ZP.PFWRT instruction complete device ZP.PFWRT instruction completed
M39 ZP.PFWRT instruction failure device ZP.PFWRT instruction failed
M40
Absolute position restoration instruction
pulse
Absolute position restoration
commanded
M41
Absolute position restoration instruction
storage
Absolute position restoration
instruction held
M42 Z.ABRST instruction complete device Z.ABRST instruction completed
M43 Z.ABRST instruction failure evice Z.ABRST instruction failed
M50
Basic parameter 1 setting complete
device
Basic parameter 1 setting completed
Internal relay
M51
—
OPR basic parameter setting complete
device
OPR basic parameter setting
completed
(2) Data resisters and timers
Device
Device
name
Axis 1 Axis 2 Axis 3 Axis 4
Application Details of storage
D0 OPR request flag
(
Md.31
Status (bit 3))
D1 Speed (low-order 16 bits)
D2 Speed (high-order 16 bits)
(
Cd.25
Position-speed switching
control speed change resister)
D3 Movement amount (low-order 16 bits)
D4 Movement amount (high-order 16 bits)
(
Cd.23
Speed-position switching
control movement amount change
resister)
D5 Inching movement amount
(
Cd.16
Inching movement amount)
D6 JOG operation speed (low-order 16 bits)
D7
JOG operation speed (high-order 16
bits)
(
Cd.17
JOG operation speed)
D8
Manual pulse generator 1 pulse input
magnification (low-order)
D9
Manual pulse generator 1 pulse input
magnification (high-order)
(
Cd.20
Manual pulse generator 1
pulse input magnification)
D10
Manual pulse generator operation
enable
(
Cd.21
Manual pulse generator
enable flag)
D11 Speed change value (low-order 16 bits)
D12 Speed change value (high-order 16 bits)
(
Cd.14
New speed value)
D13 Speed change request
(
Cd.15
Speed change request)
Data register
D14
—
Override value
(
Cd.13
Positioning operation speed
override)
 Loading...
Loading...
