12
1. Overview
1.1. Overview
This manual describes procedures for connections and settings required for
constructing robot vision applications by connecting your robot controller to the
Vision Sensor FH (hereafter referred to as Vision Sensor).
Utilizing this manual and Robot Vision Application Construction Guide can reduce
man-hours to connect the Vision Sensor to your robot controller, set the Vision Sensor,
and create robot programs.
1.2. Instructions for Building a 3D Robot Vision Application
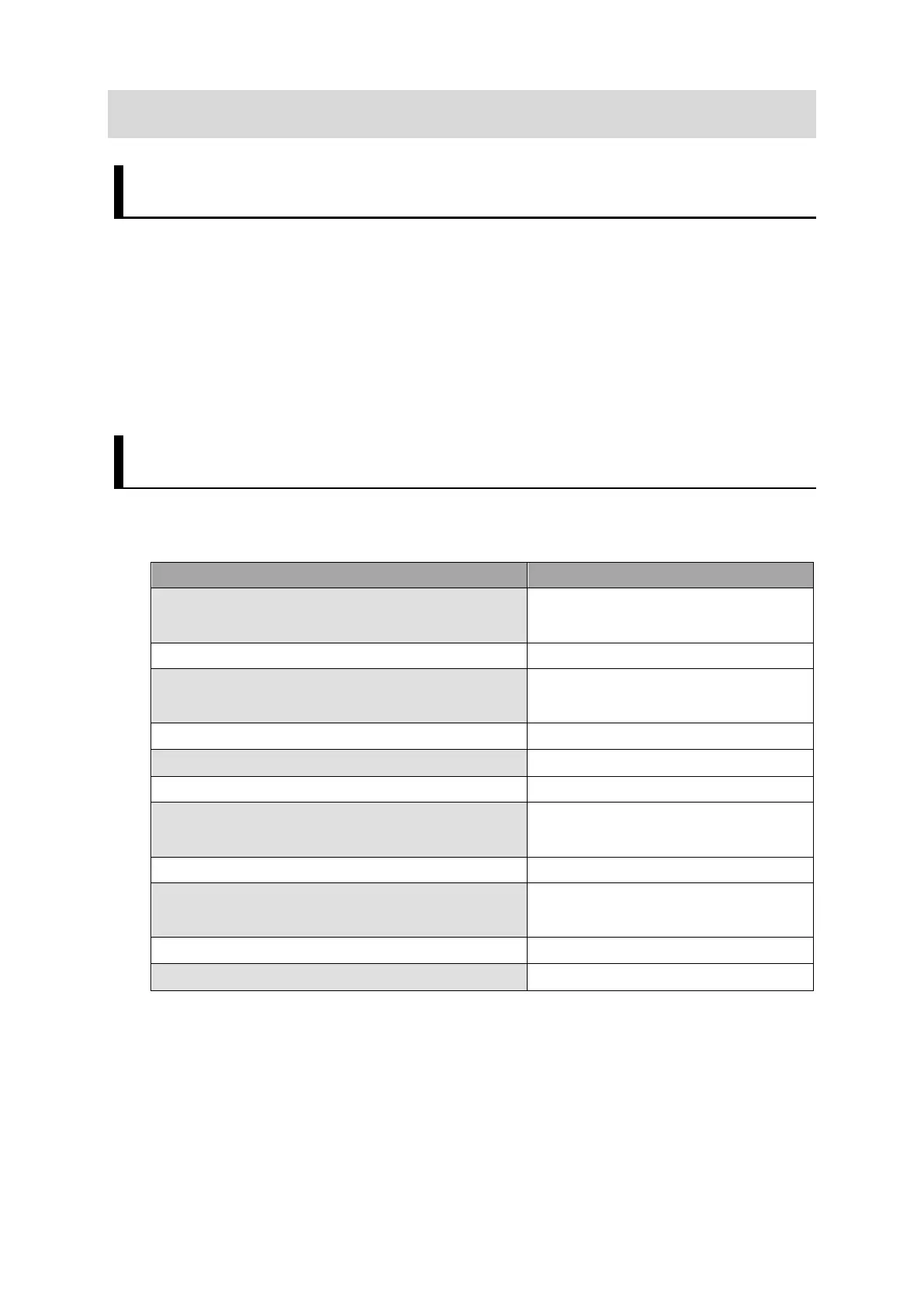
Please follow the flow below for constructing 3D robot vision applications
Creating Data Set for Robot Vision
[3D Robot Vision Application
Construction Guide] Chapter 6
↓
System Settings for the Vision Sensors
[3D Robot Vision Application
Construction Guide] Chapter 7
↓
Setting Communications for Robot controller
↓
Connecting Vision Sensor to Robot Controller
Refer to Chapter 3.2
↓
Robot Vision Settings for Vision Sensors
[3D Robot Vision Application
Construction Guide] Chapter 8
↓
Description of the sample programs

 Loading...
Loading...














