39
proceed to the next node.
3
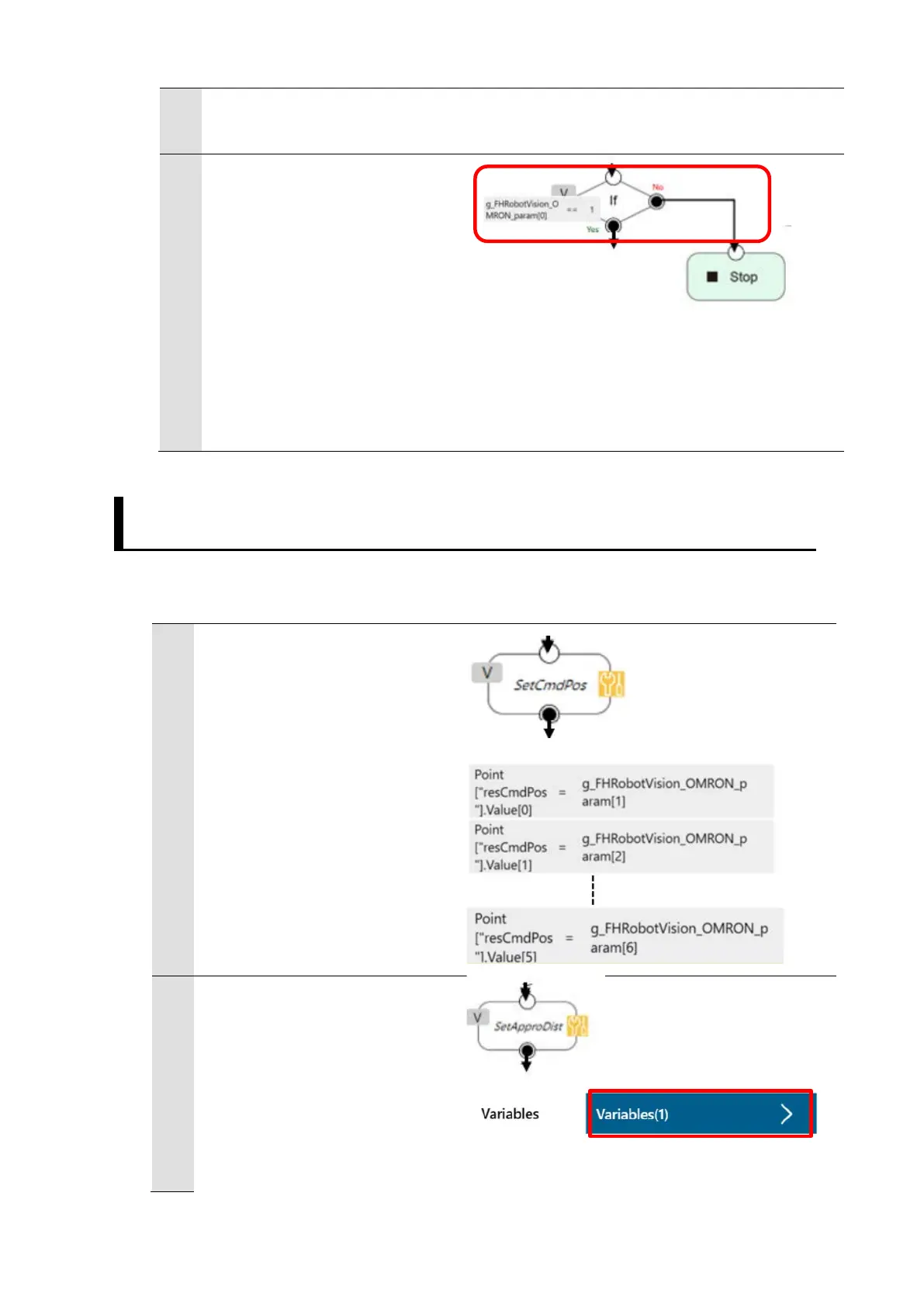
Check the TJG of the Vision
Sensor measurement result.
The TJG of the Vision Sensor
measurement result is stored
in the global variable
[g_FHRobotVision_OMRON_pa
ram[0]].
If TJG is OK (1), proceed to
the next node, otherwise exit
6.7. Moving Robot to Robot Command Position at Measurement
Using the measurement results of the Vision Sensor the robot is moved to Robot
Command Position via the approach position.
1
The [SetCmdPos] node sets
the results of the Vision Sensor
measurements to the point
variable [resCmdPos].
You can grip the Robot
Command position of the point
variable [resCmdPos].
2
Select the [SetApproDist] node
and click the pencil icon to
open the Settings dialog box.
Click [Variables(1)] and set the
approach distance to
var_approDist.

 Loading...
Loading...














