18
Click [OK] and Click an icon
enclosed in red square on the
right figure to close to Network
4
Copy the "TM_Export" folder in
the "RobotProgram" folder of
the data output from the Data
Set Output Tool for Robot
Vision to the USB memory.
5
Change the device name of
the USB memory to
6
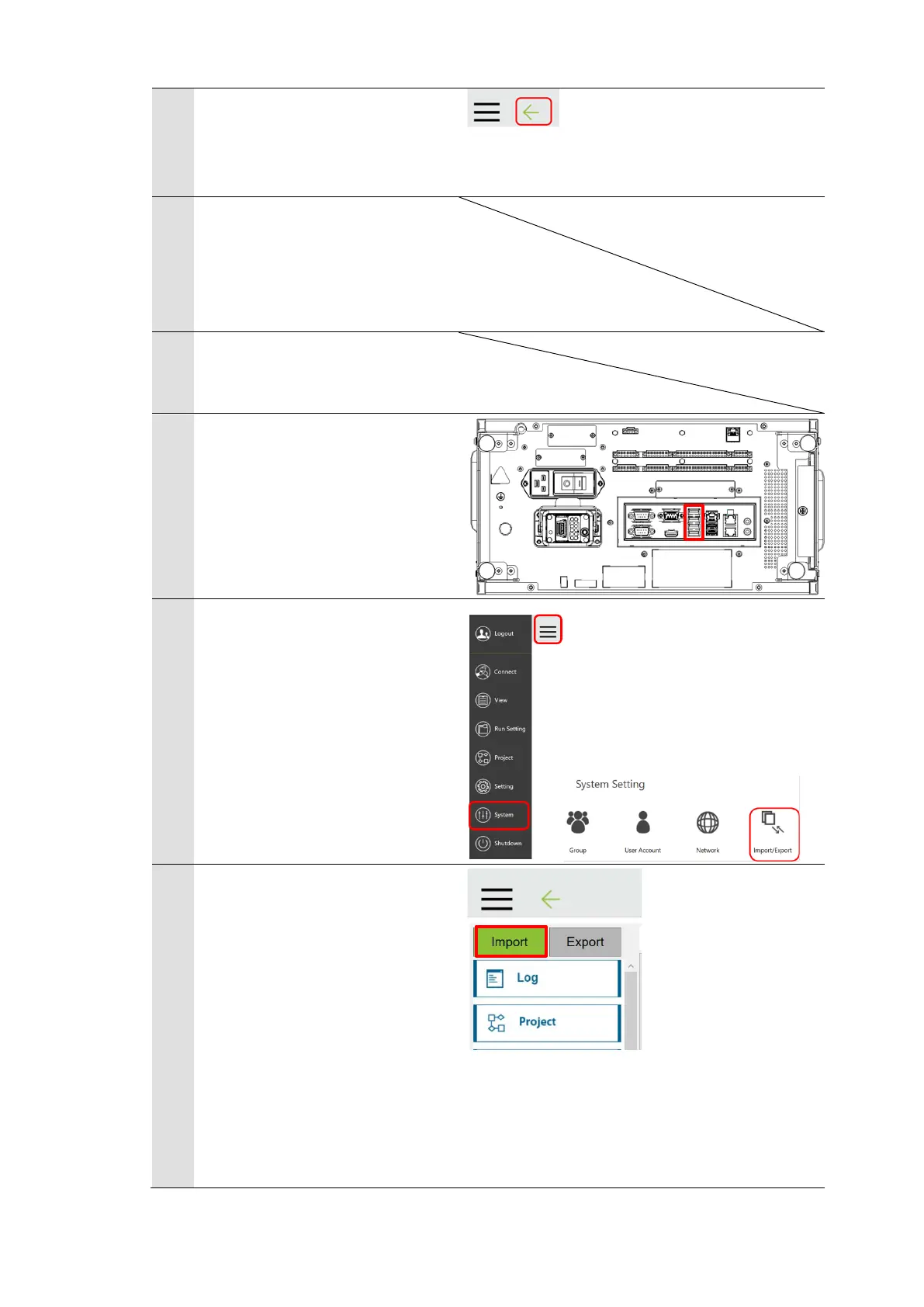
Connect the USB memory to
the USB port of the robot
controller.
7
Click the icon in the top left
menu to display a list of the
function menu.
Click
[System] – [Import/Export]
8
Click [import] in the top left
corner.
The right dialog will be
displayed, select “Configure
Controller” and click [Finish].

 Loading...
Loading...














