33
If the error code is 0 (zero),
proceed to the next node.
4
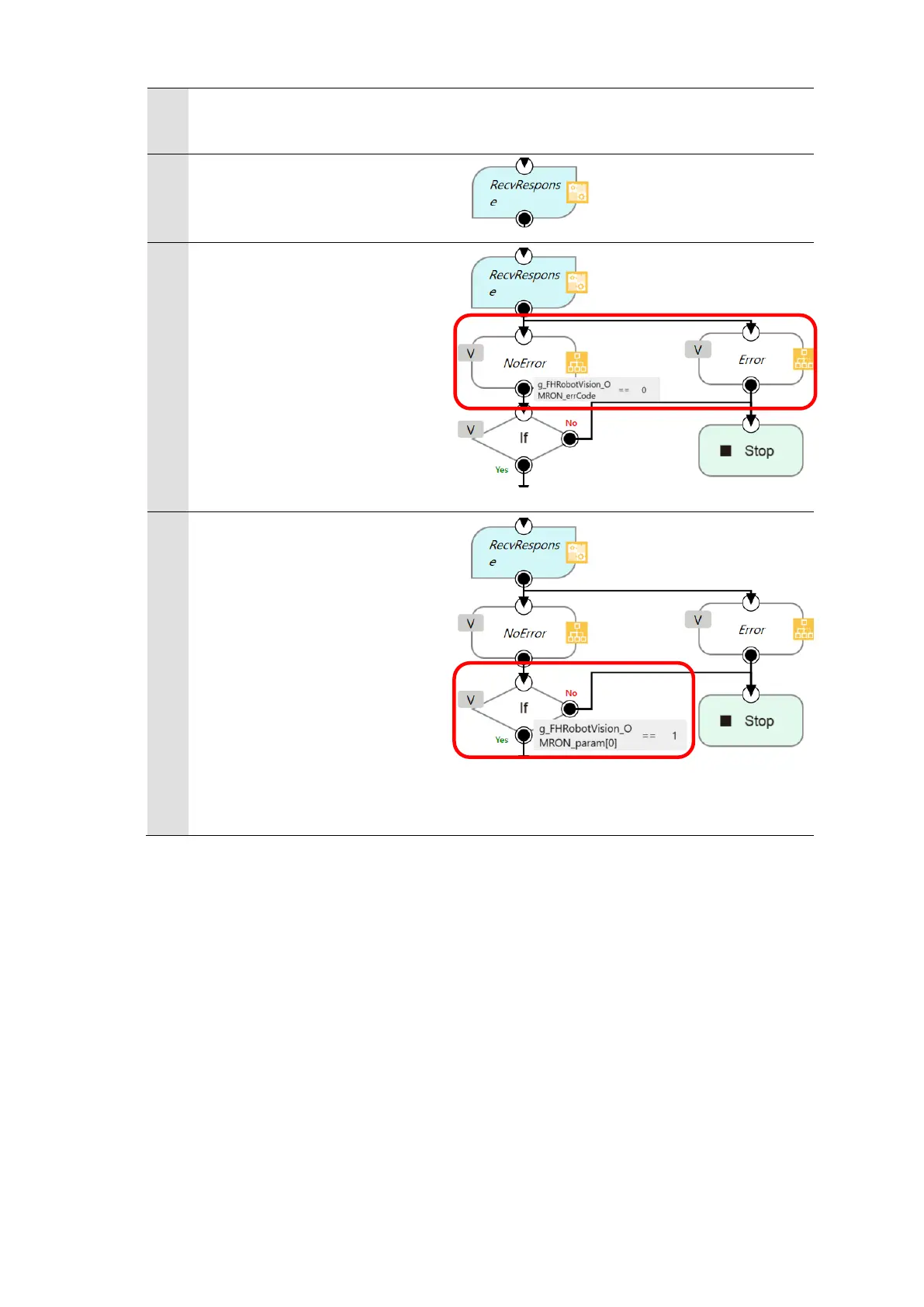
The [RecvResponse] node
receives the response to the
scene switching command.
5
Check for the error in the
[RecvResponse] node.
The error is stored in the
global variable
[g_FHRobotVision_OMRON_er
rCode].
If the error code is 0 (zero),
proceed to the next node.
6
Check the execution result
(command response) of the
[RecvResponse] node.
The result of the execution is
stored in the global variable
[g_FHRobotVision_OMRON_p
aram[0]].
If the result of the execution
is 1 (OK), then proceed to the

 Loading...
Loading...














