35
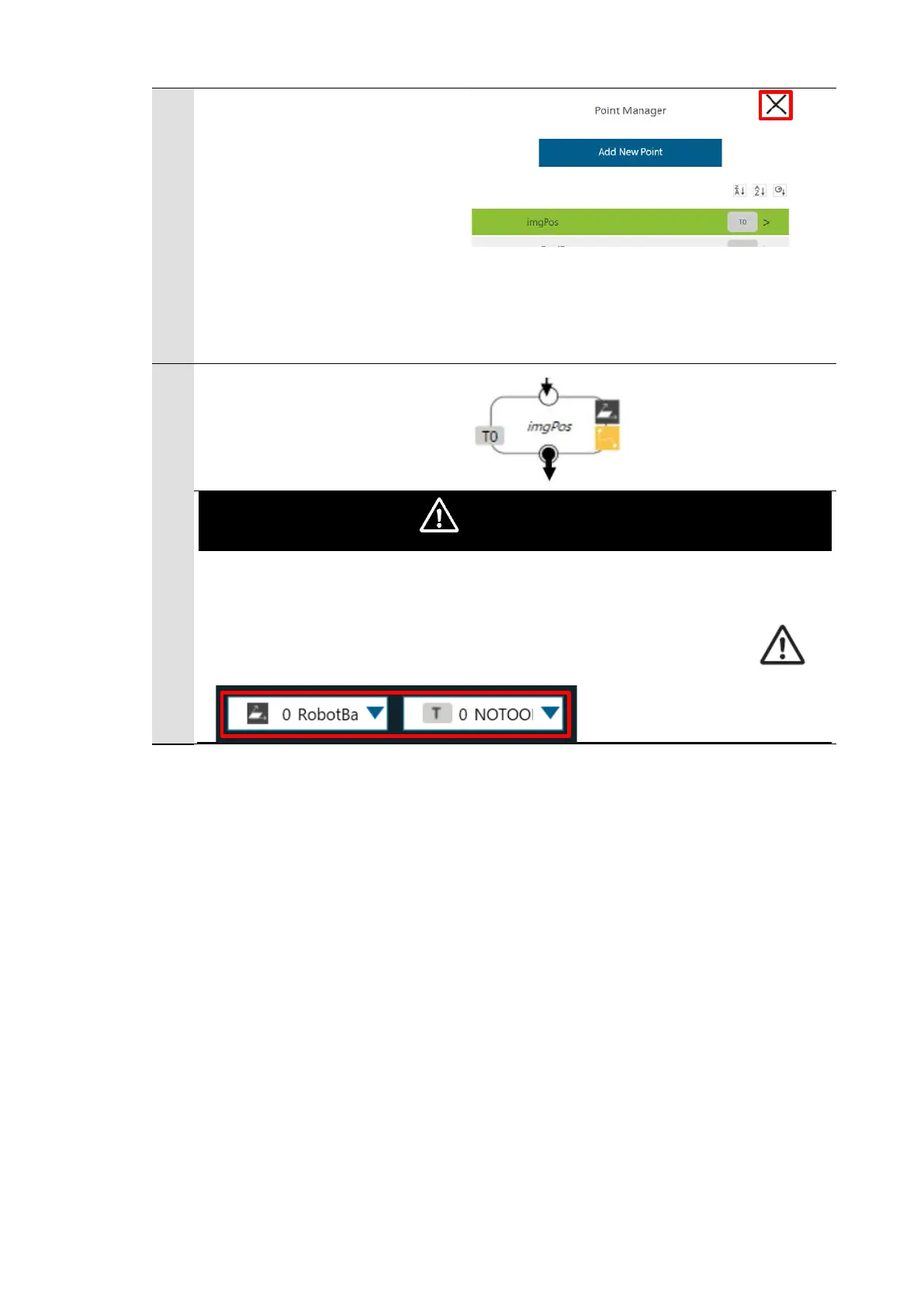
Click [X] to close the Point
Manager dialog.
3
At the [imgPos] point node,
the robot moves to the
imaging position.
WARNING
These operations drive the robot.
Operate the robot in the state whereby pressing the
[Emergency stop] button can stop its motion anytime.
In the base list, select [RobotBase] as the current base.
In the tool list, select [NOTOOL] as the current tool.

 Loading...
Loading...














