37
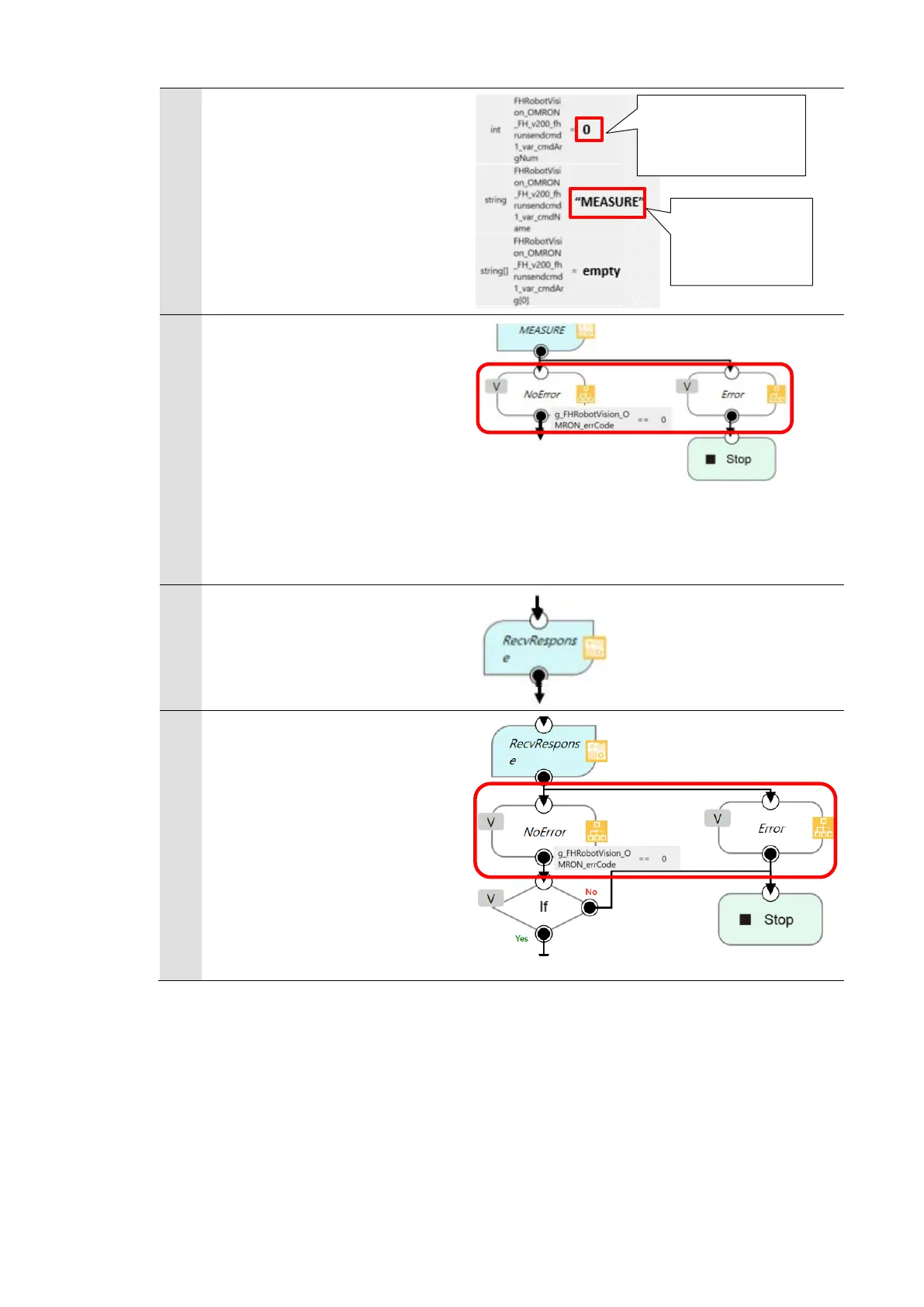
Make sure that [cmdName] is
[MEASURE].
By executing the [MEASURE]
node, measurement command
is sent to the Vision Sensor.
3
Check for the error in the
[MEASURE] node.
The error is stored in the
global variable
[g_FHRobotVision_OMRON_err
Code].
If the error code is 0 (zero),
proceed to the next node.
4
The [RecvResponse] node
receives the response to the
measurement command.
5
Check for the error in the
[RecvResponse] node.
The error is stored in the
global variable
[g_FHRobotVision_OMRON_err
Code].
If the error code is 0 (zero),
proceed to the next node.
Non-procedure
Communication
Commad
arguments

 Loading...
Loading...














