4-92
H Parameters Requiring Settings
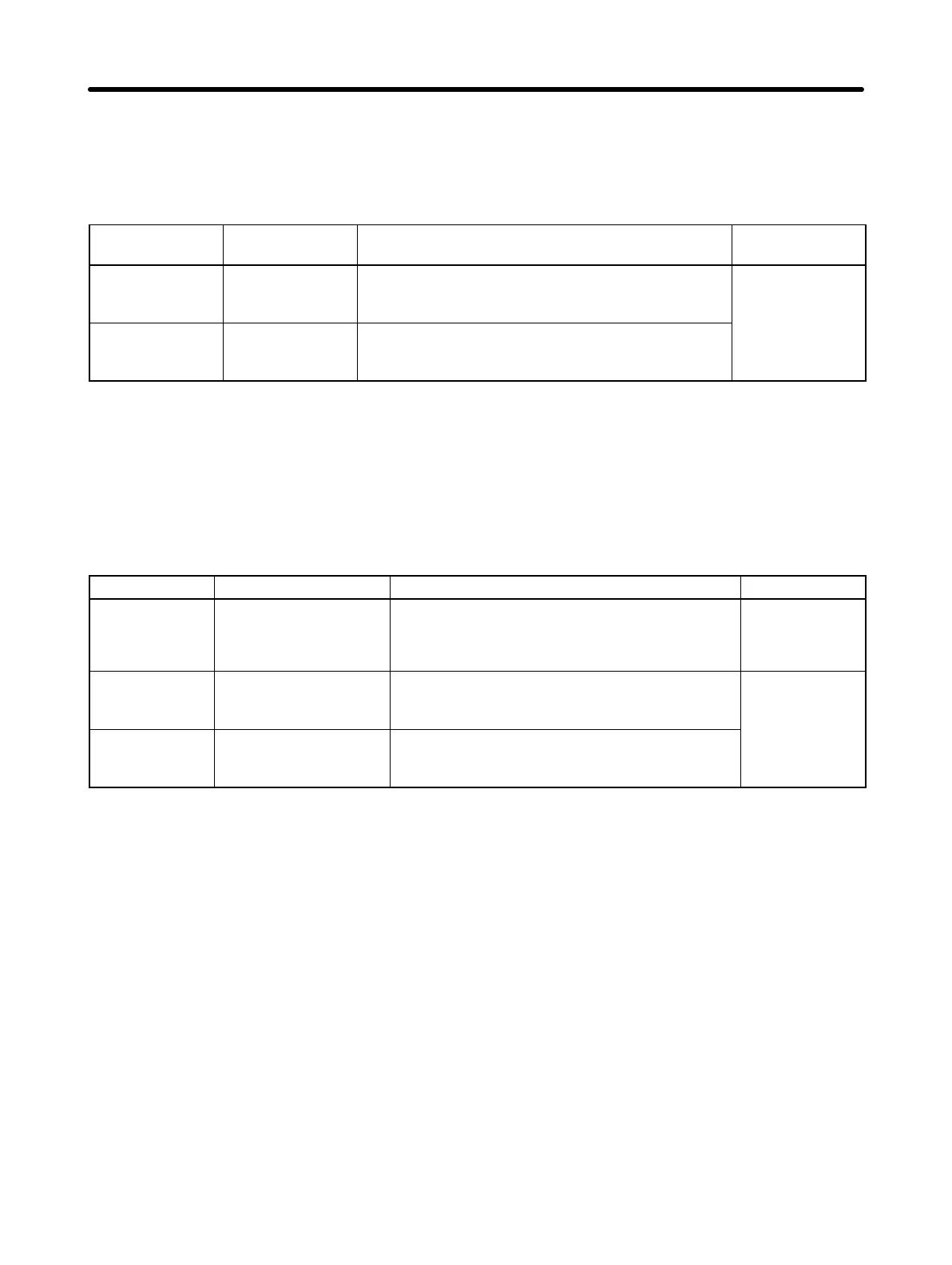
D Limiting the Steady Force Applied During Normal Operation with User Parameters
(All Operating Modes)
Parameter No. Parameter
name
Explanation Reference
Pn402 Forward torque
limit
Set the output torque limit for the forward direction
as a percentage of the rated torque (setting range:
0% to 800%).
4-4-4 Parameter
Details
Pn403 Reverse torque
limit
Set the output torque limit for the reverse direction
as a percentage of the rated torque (setting range:
0% to 800%).
Note 1. Set these parameters to 350 (the default setting) when the torque limit function is not being
used.
Note 2. If the connected Servomotor is set to a value greater than the maximum momentary torque,
the maximum momentary torque will become the set limit.
D Limiting Operation with External Signals (All Operating Modes)
Parameter No. Parameter name Explanation Reference
Pn50b.2
Pn50b.3
Input signal selection 2
PCL signal selection
NCL signal selection
You must allocate PCL and NCL. (See note 1.) 4-4-3 Important
Parameters
Pn404 Forward torque limit Set the output torque limit when PCL is ON as
a percentage of the Servomotor rated torque
(setting range: 0% to 800%).
4-4-4
Parameter
Details
Pn405 Reverse torque limit Set the output torque limit when NCL is ON as
a percentage of the Servomotor rated torque
(setting range: 0% to 800%).
Note 1. If you change the default settings, set Pn50A.0 (input signal selection mode) to 1.
Note 2. If the connected Servomotor is set to a value greater than the maximum momentary torque,
the maximum momentary torque will become the set limit.
Note 3. If using this function with internally-set speed control, set Pn50A.1 to 1 (user-defined set-
tings), and allocate the required input signals (PCL, NCL, SPD1, SPD2, RDIR, etc.)
D Limiting Normal Operation with Analog Voltage (Position, Speed, Internally-set
Speed Control)
• When Pn002.0 (torque command input switching) is set to 1, TREF (torque command input) becomes
the analog torque limit input terminal, so you can limit the torque on multiple levels.
• Calculate the torque limit (%) as follows: Absolute TREF voltage (V) / Pn400 (torque control scale) x
1000.
• Regardless of whether the voltage is positive or negative, both forward and reverse directions have
the same limits (i.e., absolute value is taken).
Operation Chapter 4

 Loading...
Loading...





