4-105
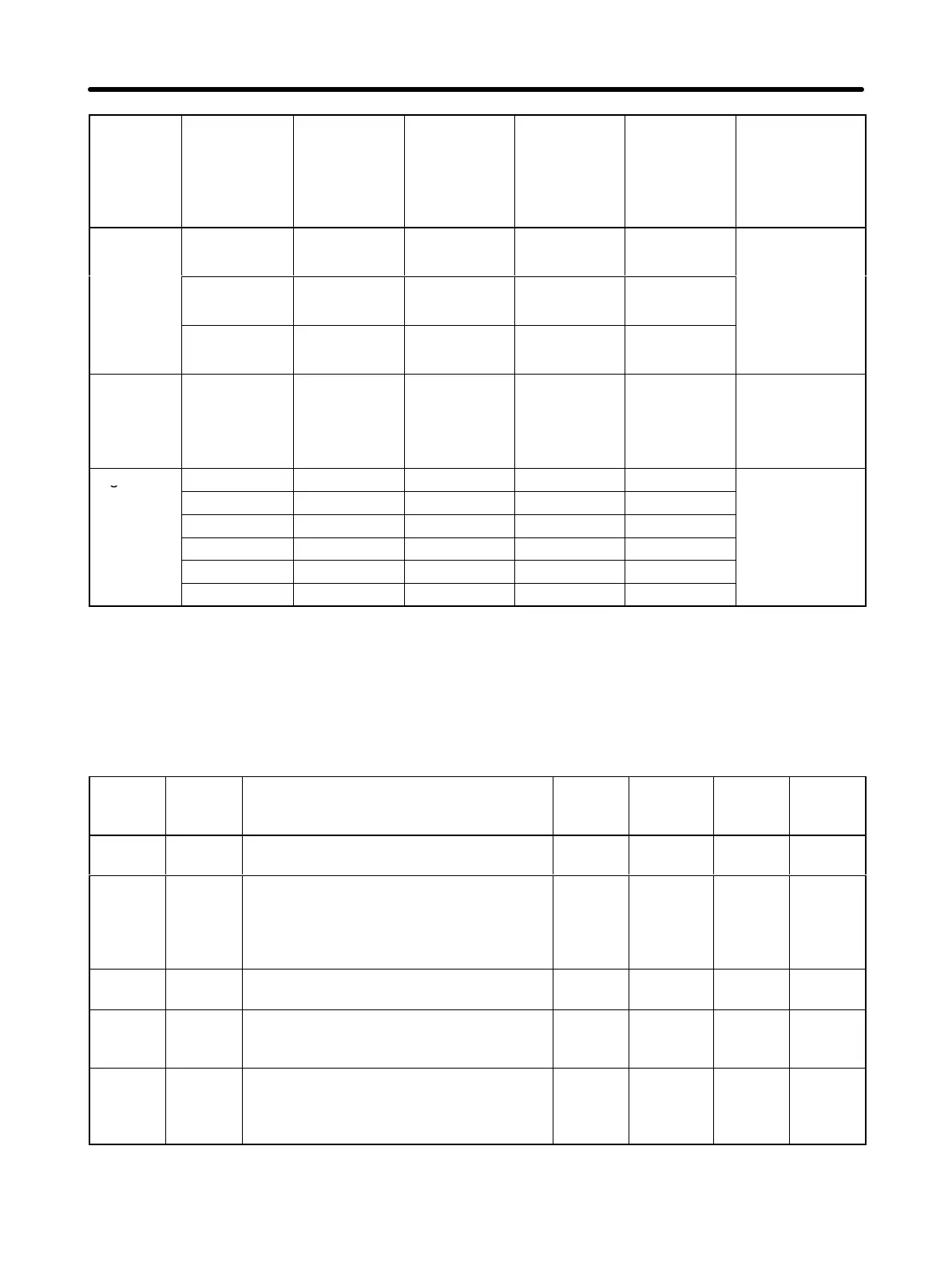
Response Rigidity
setting
Fn001
(d.00jj)
Position
loop gain
(S
–1
)
Pn102
Speed loop
gain
(Hz)
Pn100
Speed loop
integration
time
constant
(x 0.01 ms)
Pn101
Torque
command
filter time
constant
(x 0.01 ms)
Pn401
Representative
applications
(mechanical
system)
Low
01 15 15 6000 250
Articulated
robots,
02 20 20 4500 200
drives, chain
drives, belt
03 30 30 3000 130
drives, rack and
pinion drives,
etc.
Medium 04 40 40 2000 100 XY tables, Car-
tesian-coordi-
nate robots,
general-purpose
machinery, etc.
High
05 60 60 1500 70
Ball screws
06 85 85 1000 50
(direct
07 120 120 800 30
coup
ng
,
08 160 160 600 20
,
.
09 200 200 500 15
10 250 250 400 10
Note 1. The servo-system loop gain will rise in response to a higher rigidity setting, shortening posi-
tioning time. If the setting is too large, however, the machinery may vibrate, so make the set-
ting small.
Note 2. When the rigidity is set, the user parameters in the above table will change automatically.
H Manual Tuning-related User Parameters
Parame-
ter No.
Parame-
ter
name
Explanation Default
setting
Unit Setting
range
Restart
power?
Pn100 Speed
loop gain
Adjusts speed loop responsiveness. 80 Hz 1 to
2000
No
Pn101 Speed
loop
integrati
on time
constant
Speed loop integration time constant 2000 x 0.01 ms 15 to
51200
No
Pn102 Position
loop gain
Adjusts position loop responsiveness. 40 1/s 1 to
2000
No
Pn103 Inertia
ratio
Sets the ratio using the mechanical
system inertia to Servomotor rotor inertia
ratio.
300 % 0 to
1000
No
Pn401 Torque
command
filter time
constant
Sets the filter time constant for the
internal torque command.
40 x 0.01 ms 0 to
65535
No
Note Refer to 4-4-4 Parameter Details for details of each parameter.
Operation Chapter 4

 Loading...
Loading...





