4-125
H Types of Monitoring
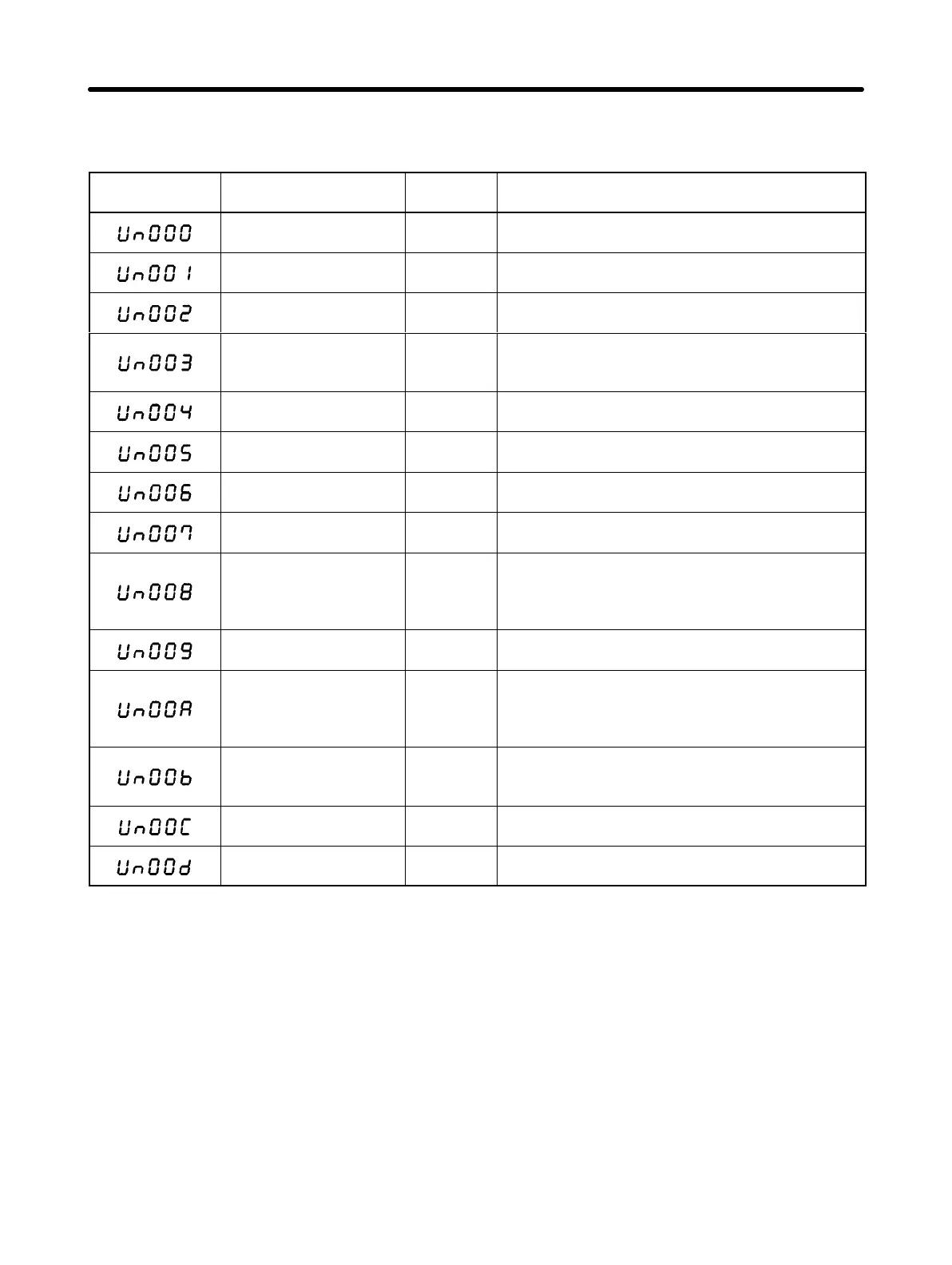
• In Monitor Mode, 14 types of monitoring can be carried out.
Display
(monitor No.)
Monitor contents Unit Explanation
Speed feedback (all
output modes)
r/min Displays actual rotation speed of Servomotor.
Speed command
(speed)
r/min Displays speed command voltage calculated in
r/min.
Torque command (all
output modes)
% Displays command values to current loop (rated
torque = 100%).
Number of pulses from
Phase Z edge (all
output modes)
Pulse Displays rotation position from Phase Z edge (4X
calculation).
Electrical angle (all
output modes)
Degrees Displays the electrical angle of the Servomotor.
Input signal monitor (all
output modes)
--- Displays the control input signal status using
ON/OFF bits.
Output signal monitor
(all output modes)
--- Displays the control output signal status using
ON/OFF bits.
Command pulse speed
display (position)
r/min Calculates and displays command pulse
frequency in r/min.
Position deviation
(deviation counter)
(position)
Command Displays the number of residual pulses in the
deviation counter (input pulse standard).
The display will change to “SAt” if the deviation
exceeds 9999.
Cumulative load ratio
(all output modes)
% Displays effective torque (rated torque = 100%,
10-s cycle).
Regeneration load ratio
(all output modes)
% Displays regeneration absorption current due to
regeneration resistance (calculates internal
resistance capacity or Pn600 setting as 100% in
10-s cycles).
Dynamic brake
resistance load ratio (all
output modes)
% Displays current consumption during dynamic
brake operation (calculates tolerance current
consumption as 100% in 10-s cycles).
Input pulse counter
(position)
Command Counts and displays input pulses (displayed in
hexadecimal).
Feedback pulse counter
(all output modes)
Pulse Counts and displays feedback pulse (4X
calculation, displayed in hexadecimal).
Operation Chapter 4

 Loading...
Loading...





